Real-Time Trajectory Planning for Autonomous Urban Driving_ Fram...
需积分: 14 185 浏览量
2020-02-26
16:28:36
上传
评论
收藏 2.67MB PDF 举报


740 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 21, NO. 2, APRIL 2016
Real-Time Trajectory Planning for Autonomous
Urban Driving: Framework, Algorithms,
and Verifications
Xiaohui Li, Zhenping Sun, Dongpu Cao, Zhen He, and Qi Zhu
Abstract
—This paper focuses on the real-time trajectory
planning problem for autonomous vehicles driving in real-
istic urban environments. To solve the complex navigation
problem, we adopt a hierarchical motion planning frame-
work. First, a rough reference path is extracted from the
digital map using commands from the high-level behav-
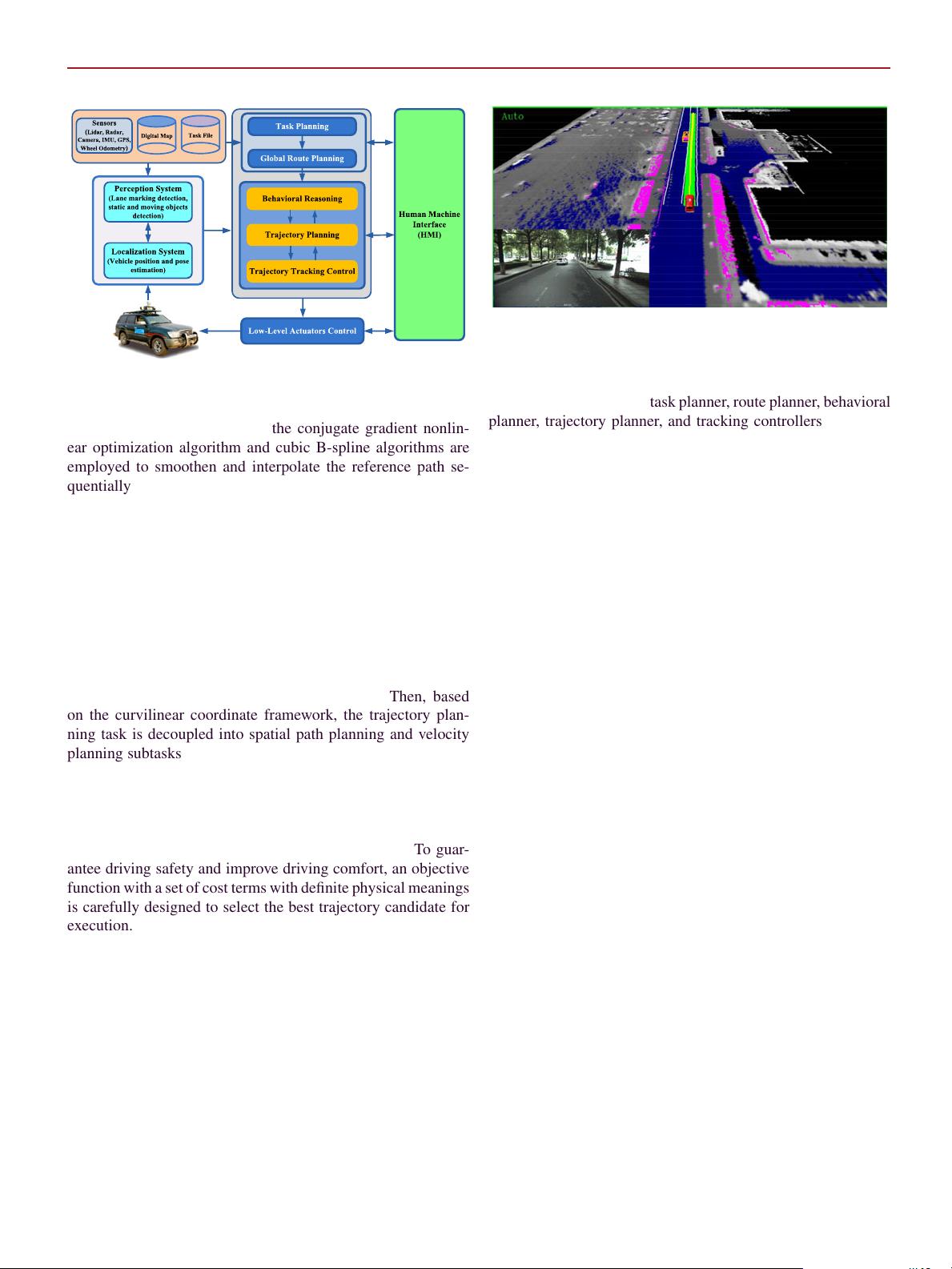
ioral planner. The conjugate gradient nonlinear optimiza-
tion algorithm and the cubic B-spline curve are employed
to smoothen and interpolate the reference path sequentially.
To follow the refined reference path as well as handle both
static and moving objects, the trajectory planning task is
decoupled into lateral and longitudinal planning problems
within the curvilinear coordinate framework. A rich set of
kinematically feasible path candidates are generated to deal
with the dynamic traffic both deliberatively and reactively. In
the meanwhile, the velocity profile generation is performed
to improve driving safety and comfort. After that, the gen-
erated trajectories are carefully evaluated by an objective
function, which combines behavioral decisions by reason-
ing about the traffic situations. The optimal collision-free,
smooth, and dynamically feasible trajectory is selected and
transformed into commands executed by the low-level lat-
eral and longitudinal controllers. Field experiments have
been carried out with our test autonomous vehicle on the
realistic inner-city roads. The experimental results demon-
strated capabilities and effectiveness of the proposed tra-
jectory planning framework and algorithms to safely handle
a variety of typical driving scenarios, such as static and
moving objects avoidance, lane keeping, and vehicle fol-
lowing, while respecting the traffic rules.
Index Terms
—Autonomous urban driving, real-time
trajectory planning, static obstacles and moving objects
avoidance.
I. INTRODUCTION AND STAT E-OF-THE-ART
A
UTONOMOUS driving technologies have great potentials
to improve driving safety by reducing traffic accidents and
fatalities caused by human errors, enhance driving efficiency by
Manuscript received April 29, 2015; revised August 3, 2015; accepted
October 19, 2015. Date of publication October 26, 2015; date of cur-
rent version February 24, 2016. Recommended by Technical Editor C.
Manzie. This work was supported by the National Nature Science Foun-
dation of China under Grant 90820302.
X. Li, Z. Sun, Z. He, and Q. Zhu are with the College of Mechatronic
Engineering and Automation, National University of Defense Technol-
ogy, Changsha 410073, China (e-mail: xiaohui_lee1986@hotmail.com;
sunzhenping@outlook.com; hezhen.nudt@gmail.com; zhq_cs@126.
com).
D. Cao is with the Department of Automotive Engineering, Cranfield
University, Cranfield MK43 0AL, U.K. (e-mail: d.cao@cranfield.ac.uk).
Color versions of one or more of the figures in this paper are available
online at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TMECH.2015.2493980
reducing traffic congestion, as well as provide mobility for peo-
ple who are not able to drive [1]–[3]. Fully autonomous driving
is generally identified as the ultimate goal of driver assistance
systems in the future [4]. The past three decades have witnessed
the significant development of autonomous driving technolo-
gies, which have drawn unprecedentedly considerable attention
from both academia and industry. Tremendous research efforts
have been contributed toward the ambitious goal of realizing
fully autonomous driving on realistic roads [5]–[7].
Particularly in the last decade, with the advent of advances
in sensors, computer technologies, and artificial intelligence,
autonomous-driving-related research topics have become ex-
traordinarily active in both the robotics community and the au-
tomotive industry [8]–[12]. Among these well-known research
projects, the DARPA Urban Challenge in 2007 could be rec-
ognized as a turning point in demonstrating the potentials of
autonomous vehicles driving in urban environments. After that,
research groups in both universities and companies are continu-
ously studying autonomous driving technologies to investigate
necessary technologies for autonomous driving on public roads.
Very recently, there has existed a number of impressive research
projects on testing autonomous vehicles driving in urban and
highway environments [13]–[19].
When autonomous ground vehicles (AGVs) advance toward
the realistic urban road traffic, they are required to be capable
of handling various complex maneuvers, such as lane keep-
ing, vehicle following, lane changing, merging, avoiding both
static and dynamic objects, and interacting with other traffic par-
ticipants while complying with the traffic rules. Developing a
robotic vehicle to have these functionalities requires the system-
atic integration of state-of-the-art technologies in perception,
localization, decision making, motion planning, and control. As
one of these core technologies, motion planning plays a critical
role in guaranteeing driving safety and comfort. In general, the
challenges of developing a reliable and robust on-road motion
planner lie in the following factors: 1) generating dynamically
feasible trajectories in real time with limited onboard compu-
tational resources; 2) dealing with the unpredictably changing
surrounding environments with limited sensing range and vis-
ibility as well as the uncertainty and noise in the perception
and localization systems; 3) interacting with other traffic partic-
ipants, such as vehicles, cyclists, and pedestrians.
Based upon a large amount of previous research on this topic
in the literature, this paper focuses on solving the trajectory
planning problem in urban driving scenarios in a practical way
instead of a theoretical way.
1083-4435 © 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.
See http://www.ieee.org/publications
standards/publications/rights/index.html for more information.

剩余13页未读,继续阅读
资源评论













