定位超宽带定位室内定位高精度定位联睿定位算法
需积分: 9 122 浏览量
2017-02-08
11:30:43
上传
评论 2
收藏 1.25MB PDF 举报

室内定位算法及其混合算法剖析
随着科技的发展,LBS 服务越来越深入人们的日常生活和工作,随着需求的增加,相应
的室内定位技术也如雨后春笋般涌现出来并发展迅速,WIFI、蓝牙、Zigebee、地磁、UWB、
WLAN 等众多技术各有特色,但其核心的定位原理究竟怎样呢,今天小编就在这里与大家共
同探讨常见的室内定位算法及其混合算法。
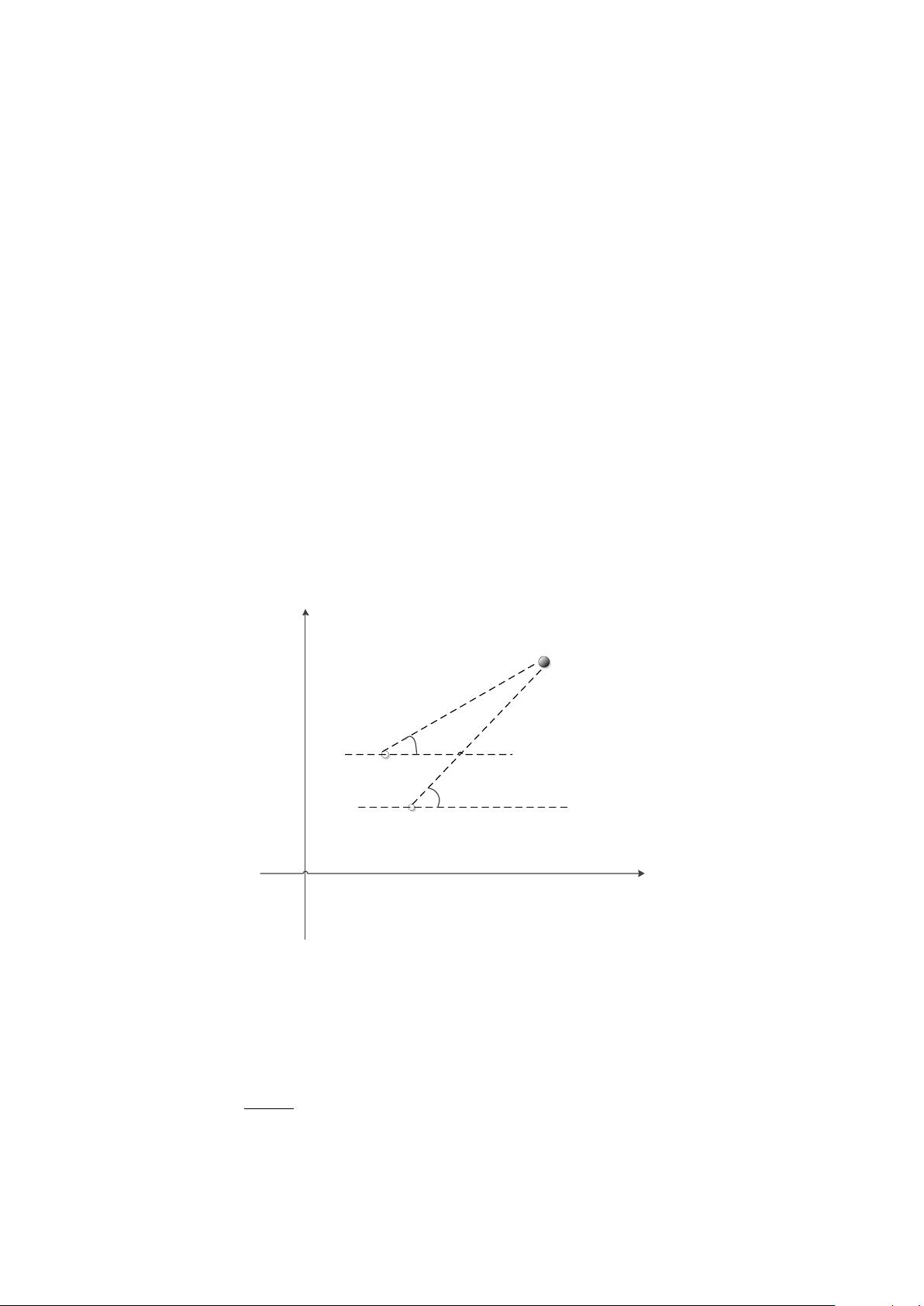
1 .1 AOA 定位
基于到达角(Angle Of Arrival, AOA)也称为三角测量是一种远程定位系统,
即通过已知移动设备和多个接入点间的角度进行定位。在 AOA 远程定位系统中,
两个已知位置和方向的基站需要计算出发送自用户信号的角度。角度是通过不断
调控方向天线波束,直到最大的信号长度或者相干相位来得到的。位置通过每个
基站 AOA 测量的轨迹的交点计算得出,而 AOA 测量的轨迹为直线,如下图 1-1
所示。
BS1
BS2
MS
1
2
图 1-1 AOA 定位示意图
在二维空间中,假设第 N 个基站的坐标为
),(
nn
yx
,移动待测点 MS 的坐标
为
yx,
,通过上图可以建立 BS 与 MS 的几何位置关系,表述如下:
n
n
n
xx
yy
tan
(1-1)
式中,
n
为第 N 个基站获得的方位角信息,由两个基站的 AOA 得到方程组,
剩余12页未读,继续阅读
资源评论


UWB高精度定位
- 粉丝: 5
- 资源: 5











