






动作编辑器和动作编译器说明 2013.9.1
……
本动作编辑器适用于非常常见的 17 舵机人型机器人,也可取其中一部分用于更简单的
机器人的动作编辑。
于 2011 年完成,当时为了给学校做机器人,做好之后就一直自己私藏着,如今将其公
开,如果有做同类型机器人或者更简单的机器人时可以选择使用。
总体编辑过程大概是这样:
1、在使用动作编辑器编辑的过程中会同时向机器人发送指令,可以实时观察机器人的
状态并调整动作,将一个个造型保存,最终导出一个 .source 动作源文件。此步详见“动作
编辑器和.source 文件”。
2、把动作源文件(.source 文件)用动作编译器打开,编译出动作文件 .acon。详见
“动作编译器和.acon 文件”
3、.acon 文件放到机器人身上执行(实际使用是把文件放在 SD 卡里,然后插到机器
人上。你可以准备多张 SD 卡放不同的动作,也可以在一张 SD 卡里放多个动作,只要机器
人能将动作文件读取出来即可)。
以上是我采用的控制方法,也可以不用我的控制方案,我会将动作编辑器的协议给出,
可以从中针对性地取用一部分功能,或者按照自己的想法进一步开发。
目录
…….......................................................................................................................................... 1
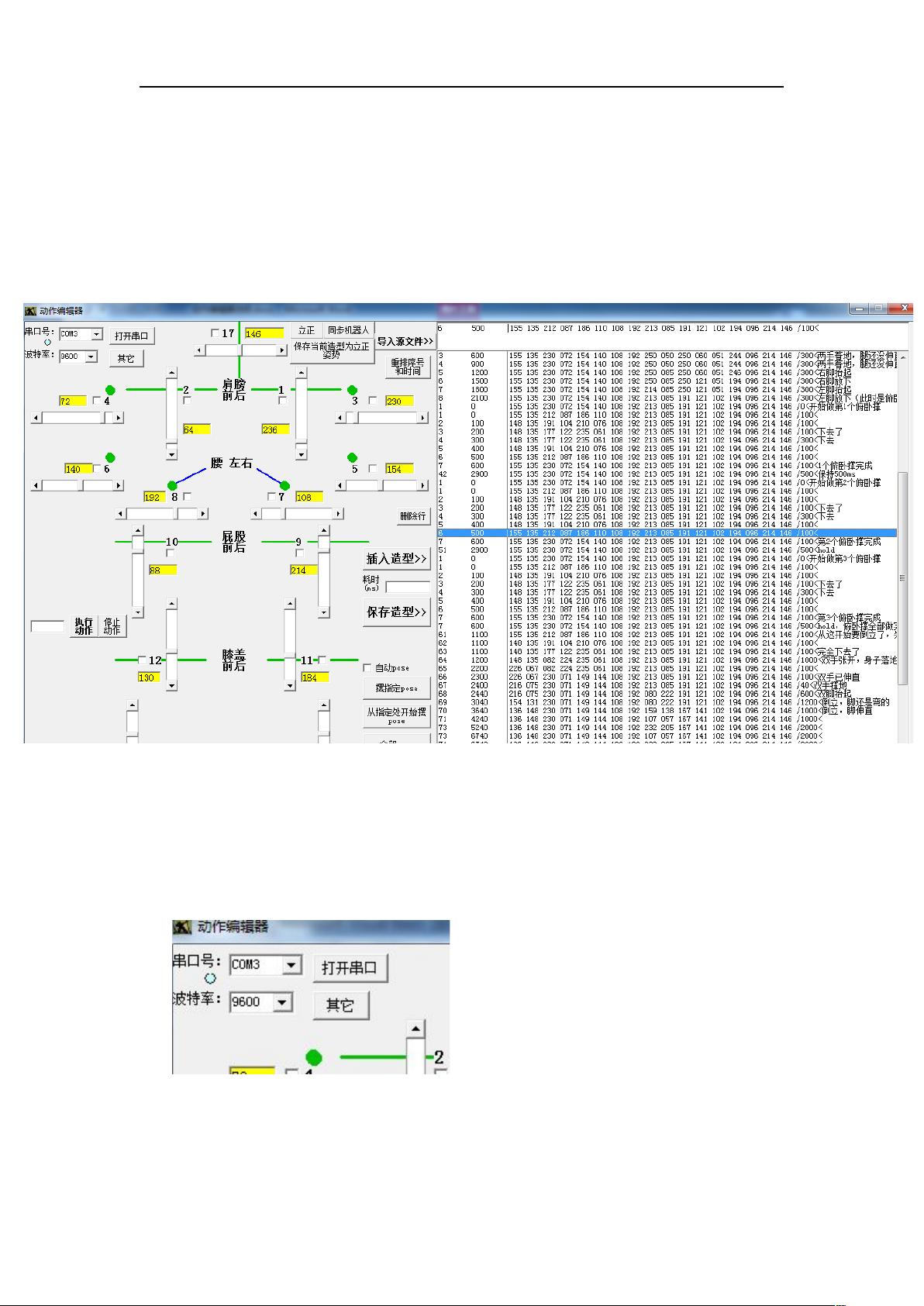
一、动作编辑器和.source 文件............................................................................................ 2
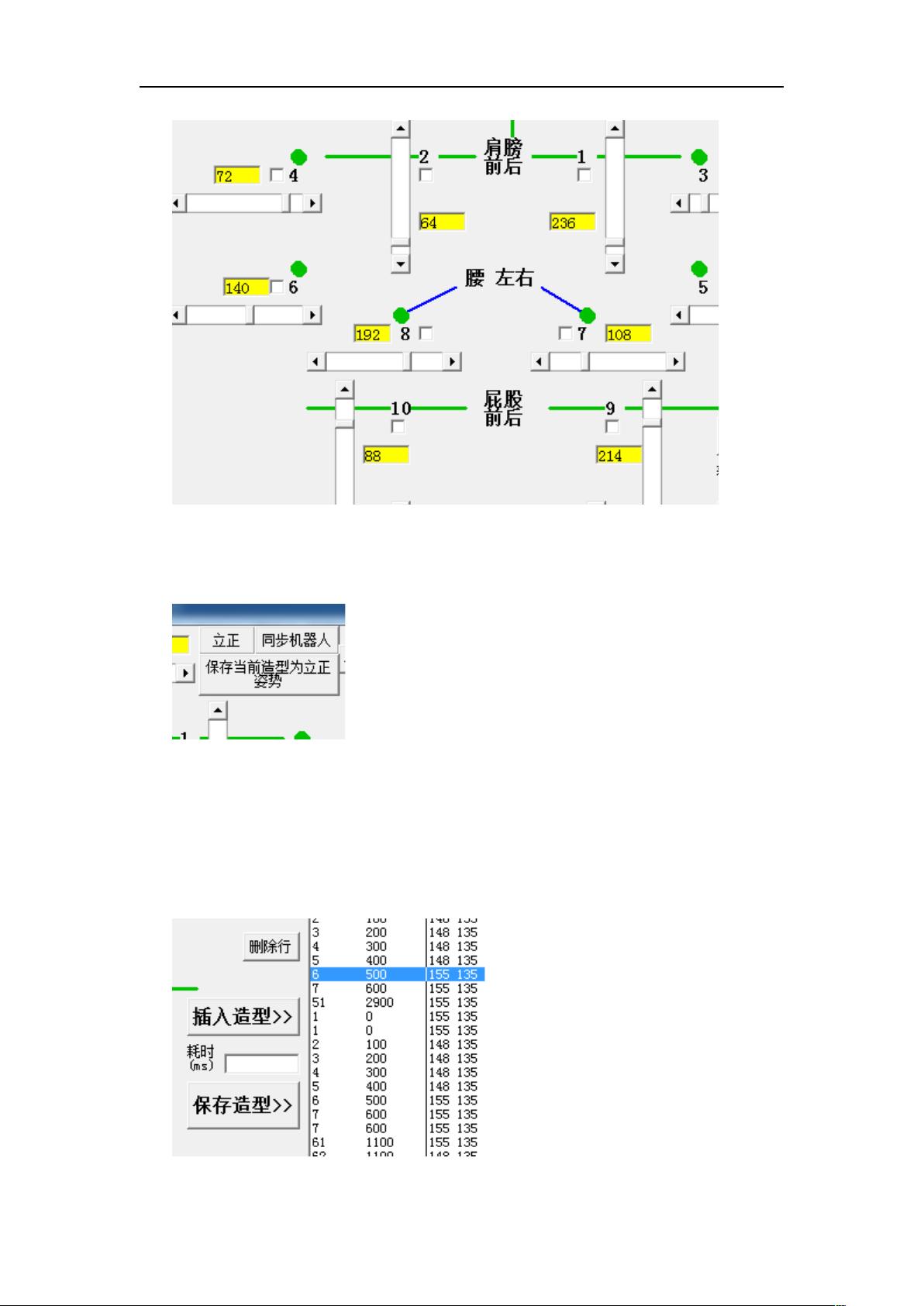
1、界面说明.................................................................................................................. 2
2、协议说明:.............................................................................................................. 5
2.1 动作编辑器输出协议说明.......................................................................................5
2.2 source 文件格式说明............................................................................................... 6
二、动作编译器和.acon 文件.............................................................................................6
1、acon 文件................................................................................................................ 7
2、动作编译器.............................................................................................................. 7
1













- 1
- 2
- 3
前往页