SNUG San Jose 2002 Simulation and Synthesis Techniques for
Rev 1.1 Asynchronous FIFO Design
1.0
Introduction
An asynchronous FIFO refers to a FIFO design where data values are written to a FIFO buffer from one clock
domain and the data values are read from the same FIFO buffer from another clock domain, where the two clock
domains are asynchronous to each other.
Asynchronous FIFOs are used to safely pass data from one clock domain to another clock domain.
There are many ways to do asynchronous FIFO design, including many wrong ways. Most incorrectly implemented
FIFO designs still function properly 90% of the time. Most almost-correct FIFO designs function properly 99%+ of
the time. Unfortunately, FIFOs that work properly 99%+ of the time have design flaws that are usually the most
difficult to detect and debug (if you are lucky enough to notice the bug before shipping the product), or the most
costly to diagnose and recall (if the bug is not discovered until the product is in the hands of a dissatisfied customer).
This paper discusses one FIFO design style and important details that must be considered when doing asynchronous
FIFO design.
The rest of the paper simply refers to an “asynchronous FIFO” as just “FIFO.”
2.0
Passing multiple asynchronous signals
Attempting to synchronize multiple changing signals from one clock domain into a new clock domain and insuring
that all changing signals are synchronized to the same clock cycle in the new clock domain has been shown to be
problematic[1]. FIFOs are used in designs to safely pass multi-bit data words from one clock domain to another.
Data words are placed into a FIFO buffer memory array by control signals in one clock domain, and the data words
are removed from another port of the same FIFO buffer memory array by control signals from a second clock
domain. Conceptually, the task of designing a FIFO with these assumptions seems to be easy.
The difficulty associated with doing FIFO design is related to generating the FIFO pointers and finding a reliable
way to determine full and empty status on the FIFO.
2.1
Synchronous FIFO pointers
For synchronous FIFO design (a FIFO where writes to, and reads from the FIFO buffer are conducted in the same
clock domain), one implementation counts the number of writes to, and reads from the FIFO buffer to increment (on
FIFO write but no read), decrement (on FIFO read but no write) or hold (no writes and reads, or simultaneous write
and read operation) the current fill value of the FIFO buffer. The FIFO is full when the FIFO counter reaches a
predetermined full value and the FIFO is empty when the FIFO counter is zero.
Unfortunately, for asynchronous FIFO design, the increment-decrement FIFO fill counter cannot be used, because
two different and asynchronous clocks would be required to control the counter. To determine full and empty status
for an asynchronous FIFO design, the write and read pointers will have to be compared.
2.2
Asynchronous FIFO pointers
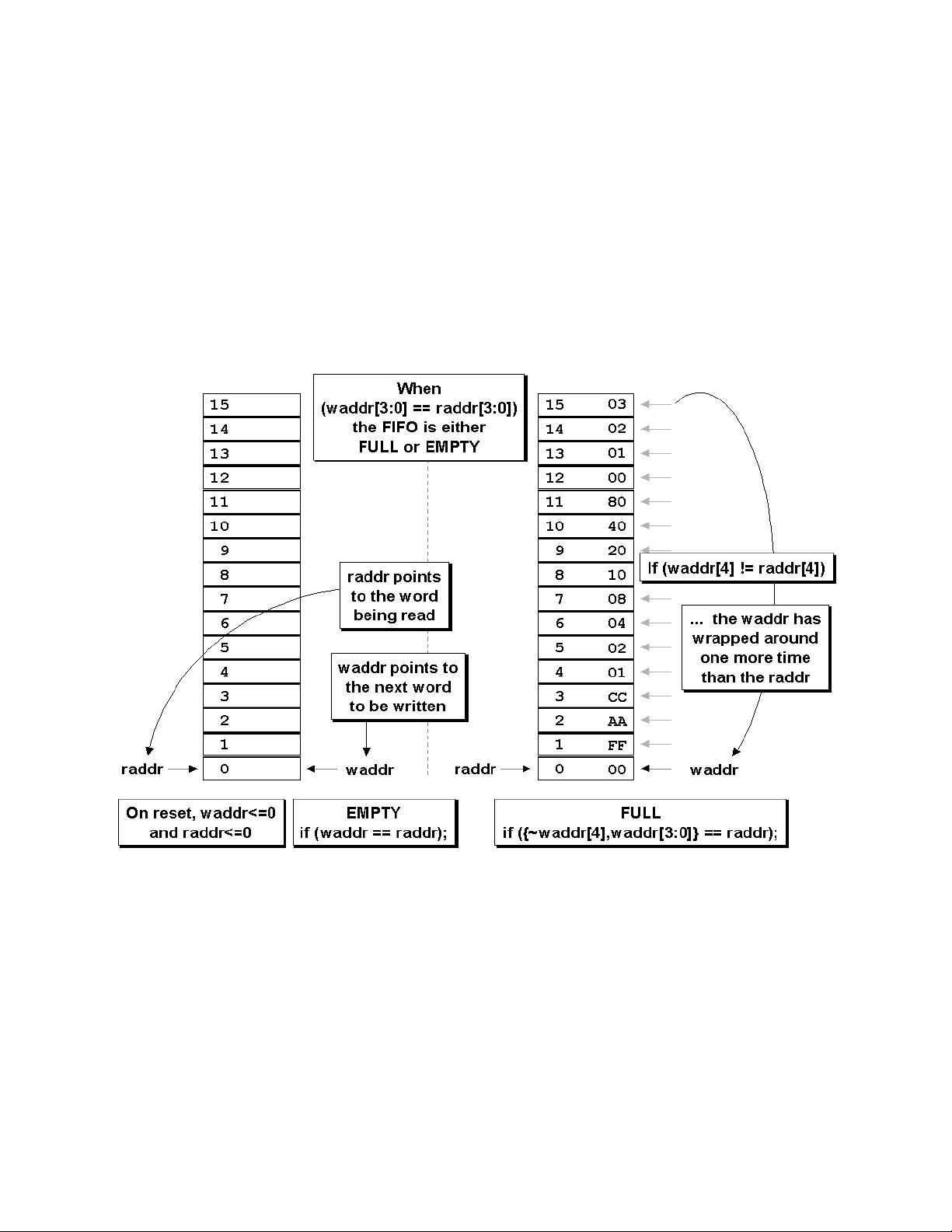
In order to understand FIFO design, one needs to understand how the FIFO pointers work. The write pointer always
points to the next word to be written; therefore, on reset, both pointers are set to zero, which also happens to be the
next FIFO word location to be written. On a FIFO-write operation, the memory location that is pointed to by the
write pointer is written, and then the write pointer is incremented to point to the next location to be written.
Similarly, the read pointer always points to the current FIFO word to be read. Again on reset, both pointers are set to
zero, the FIFO is empty and the read pointer is pointing to invalid data (because the FIFO is empty and the empty
flag is asserted). As soon as the first data word is written to the FIFO, the write pointer increments, the empty flag is
cleared, and the read pointer that is still addressing the contents of the first FIFO memory word, immediately drives
that first valid word onto the FIFO data output port, to be read by the receiver logic. The fact that the read pointer is
always pointing to the next FIFO word to be read means that the receiver logic does not have to use two clock
periods to read the data word. If the receiver first had to increment the read pointer before reading a FIFO data word,
the receiver would clock once to output the data word from the FIFO, and clock a second time to capture the data
word into the receiver. That would be needlessly inefficient.