

2019/3/13 旺材汽车电子
https://mp.weixin.qq.com/s?__biz=MzIwNjU4MDQ3NQ==&mid=2247493239&idx=2&sn=234421c55e8e5d0df9c576f3fe3f7ed9&chksm=971dd9e…
1/12
干货 | 自动驾驶汽车感知系统关键技术综述
更多,更及时的干货内容,请关注我们的微信公众号
诚邀业内人士及机构向我们投稿,投稿有礼
投稿邮箱:tougao@51wctt.com
作者:公安部道路交通安全研究中心 王艺帆
来源:MEMS
自动驾驶汽车是汽车电子、智能控制以及互联网等技术发展融合的产物,其原理为自动驾驶系统利用
感知系统,获取车辆自身以及外界环境信息,经过计算系统分析信息、做出决策,控制执行系统实现
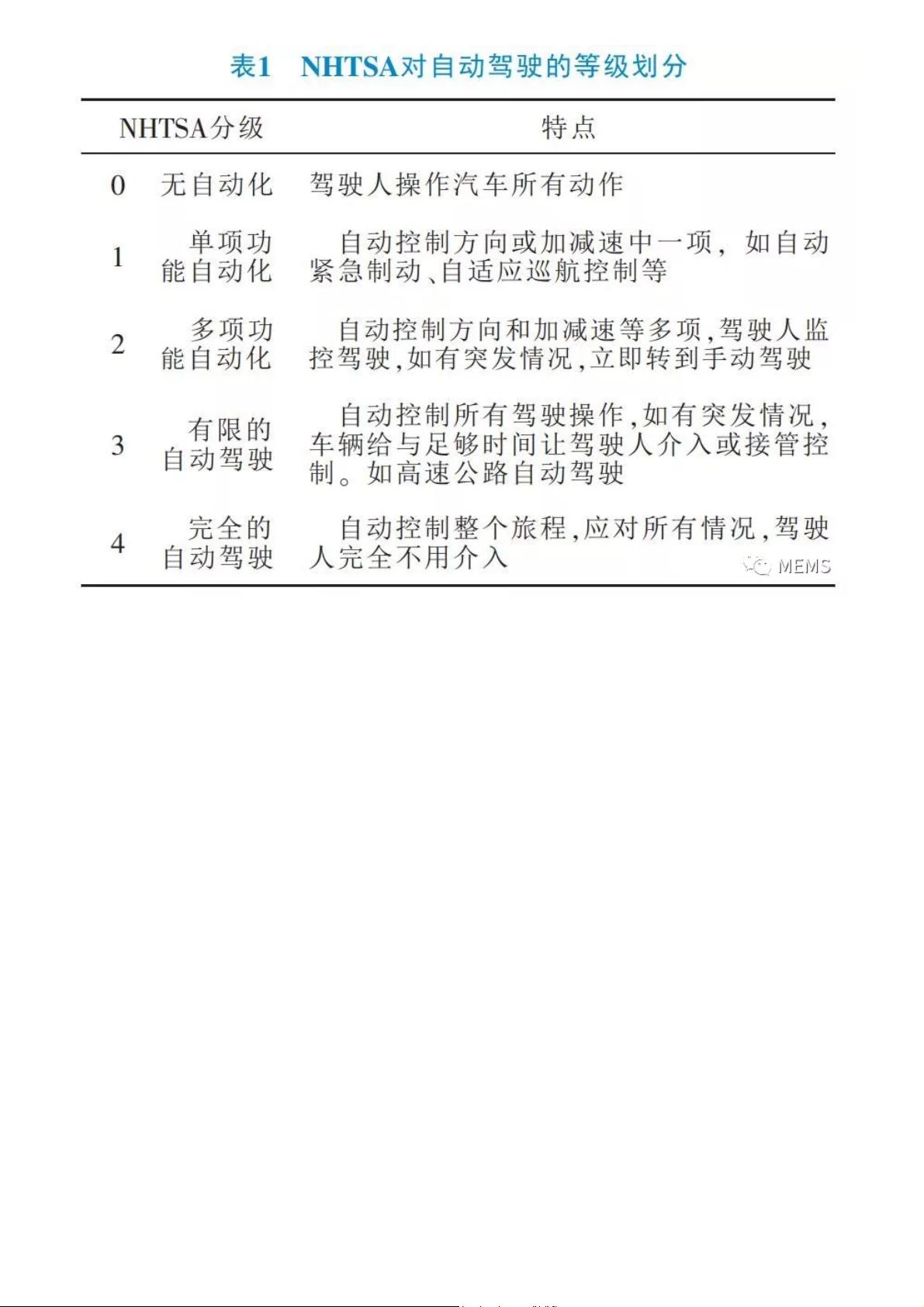
车辆加速、减速或转向,从而在无需驾驶员介入的情况下,完成自动行驶。2013年,美国国家公路
交通安全管理局(NHTSA)根据辅助控制系统的自动化功能,将自动驾驶技术分为0~4级,如表1所
示。从表1可了解到,自动驾驶的发展升级是从辅助驾驶到主宰驾驶,从提供单一功能、应对简单场
景,到可掌控所有场合,完全解放驾驶人。期间,感知系统需不断提高获取周边环境信息的全面性、
准确性和高效性,它是自动驾驶的基础,也是贯穿升级的核心部分。本文将介绍自动驾驶感知系统常
用方案,及其各自技术方法、特点和应用情况。
今天旺材汽车电子
剩余8页未读,继续阅读
资源评论


zl2002zl
- 粉丝: 2
- 资源: 2









最新资源
- Java-美妆神域_3rm1m18i_221-wx.zip
- springboot高考志愿智能推荐系统 LW PPT.zip
- web学校课程管理系统(编号:07471106).zip
- SpringBoot的校园服务系统(编号:61189239).zip
- 百货中心管理系统(编号:745621100)(1).zip
- 毕业生就业推荐系统(编号:0225912).zip
- game_patch_1.29.13.13020.pak
- 毕业生追踪系统(编号:13356163).zip
- 宾馆客房管理系统设计与实现(编号:70764218).zip
- 餐品美食论坛(编号:3118587).zip
- 仓库管理系统(编号:6809848).zip
- 大学生就业系统.zip
- 宠物管理系统.zip
- 大学生心理咨询平台(编号:40361285).zip
- 大学生校园线上招聘系统(编号:0926903)(1).zip
- 大学生就业信息管理系统_xb8ce10b_229-wx.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


