目标跟踪中比较实用的一份资料

Ensemble Tracking
Shai Avidan
Abstract—We consider tracking as a binary classification problem, where an ensemble of weak classifiers is trained online to
distinguish between the object and the background. The ensemble of weak classifiers is combined into a strong classifier using
AdaBoost. The strong classifier is then used to label pixels in the next frame as either belonging to the object or the background, giving
a confidence map. The peak of the map and, hence, the new position of the object, is found using mean shift. Temporal coherence is
maintained by updating the ensemble with new weak classifiers that are trained online during tracking. We show a realization of this
method and demonstrate it on several video sequences.
Index Terms—AdaBoost, visual tracking, video analysis, concept learning.
Ç
1INTRODUCTION
V
ISUAL tracking is a critical step in many machine vision
applications such as surveillance [22], driver assistance
systems [1], or human-computer interactions [3]. Tracking
finds a region in the current image that matches the given
object, but if the matching function takes into account only
the object, and not the background, then it might not be able
to correctly distinguish the object from the background and
the tracking might fail.
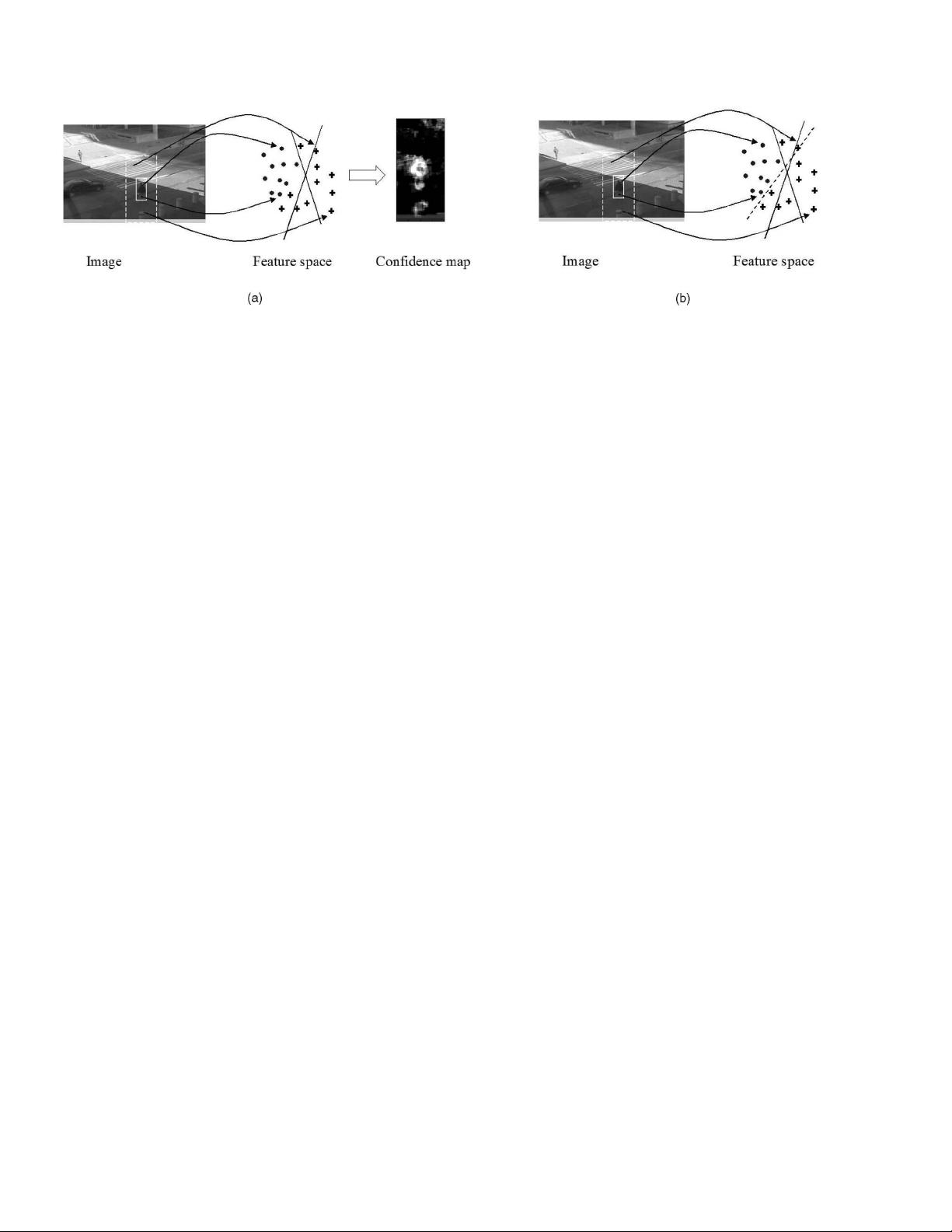
We treat tracking as a classification problem and train a
classifier to distinguish the object from the background.
This is done by constructing a feature vector for every pixel
in the reference image and training a classifier to separate
pixels that belong to the object from pixels that belong to the
background. Given a new video frame, we use the classifier
to test the pixels and form a confidence map. The peak of
the map is where we believe the object moved to and we
use mean shift [6] to find it.
If the object and background do not change over time,
then training a classifier when the tracker is initialized
would suffice, but, when the object and background change
their appearance, then the tracker must adapt accordingly.
Temporal integration is maintained by constantly training
new weak classifiers and adding them to the ensemble of
weak classifiers. The ensemble thus achieves two goals:
Each weak classifier is tuned to separate the object from the
background in a particular frame and the ensemble as a
whole ensures temporal coherence.
The overall algorithm proceeds as follows: We maintain an
ensemble of weakclassifiers that is used to create a confidence
map of the pixels in the current frame and run mean-shift to
find its peak and, hence, the new position of the object. Then,
we update the ensemble by training a new weak classifier on
the current frame and adding it to the ensemble.
Ensemble tracking extends traditional mean-shift tracking
in a number of important directions. First, mean-shift
tracking usually works with histograms of RGB colors. This
is because gray-scale images do not provide enough informa-
tion for tracking and high-dimensional feature spaces cannot
be modeled with histograms due to exponential memory
requirements. By switching to general machine learning
classifiers, ensemble tracking avoids both pitfalls. It can
handle gray-scale images by introducing local neighborhood
information and it does not suffer from exponential memory
explosion because it is no longer restricted to working with
histograms, as it can work with any type of classifier. Second,
ensemble tracking gives a principled manner in which the
classifiers are integrated over time. This is in contrast to
existing methods that either represent the foreground object
using the most recent histogram or some ad hoc combination
of the histograms of the first and last frames.
In addition, the proposed method offers several advan-
tages. It breaks the time consuming training phase into a
sequence of simple and easy to compute learning tasks that
can be performed online. It can automatically adjust the
weights of different classifiers, trained on different feature
spaces. It can also integrate offline and online learning
seamlessly. For example, if the object class to be tracked is
known, then one can train several weak classifiers offline on
large data sets and use these classifiers in addition to the
classifiers learned online. Also, integrating classifiers over
time improves the stability of the tracker in cases of partial
occlusions or illumination changes. Finally, on a higher
level, one can view ensemble tracking as a method for
training classifiers on time-varying distributions.
2BACKGROUND
Ensemble learning techniques combine a collection of weak
classifiers into a single strong classifier. AdaBoost [13], for
example, trains a weak classifier on increasingly more
difficult examples and combines the result to produce a
strong classifier that is better than any of the weak classifiers.
Treating tracking as a binary classification problem was
already considered in the past. Lin et al. [20] suggest an
adaptive discriminative generative model where a Fisher
Linear Discriminant function is const antly evaluated to
discri minate the object from the back ground. A similar
approach was taken by Nguyen and Smeulders [21].
Comaniciu et al. [6] adopt this approach to their mean-shift
algorithm, where colors that appear on the object are
IEEE TRANSAC TIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 29, NO. 2, FEBRUARY 2007 261
. The author is with Mitsubishi Electric Research Labs, 201 Broadway,
Cambridge, MA 02139. E-mail: avidan@merl.com.
Manuscript received 3 Nov. 2005; revised 14 Apr. 2006; accepted 18 May
2006; published online 13 Dec. 2006.
Recommended for acceptance by P. Fua.
For information on obtaining reprints of this article, please send e-mail to:
tpami@computer.org, and reference IEEECS Log Number TPAMI-0600-1105.
0162-8828/07/$20.00 ß 2007 IEEE Published by the IEEE Computer Society

剩余10页未读,继续阅读
资源评论

 hustasdfasdf2013-12-22ensemble Tracking的论文,英文,难理解。
hustasdfasdf2013-12-22ensemble Tracking的论文,英文,难理解。


dragon_perfect
- 粉丝: 298
- 资源: 20









最新资源
- Python爬取淘宝热卖商品并可视化分析
- 5152单片机proteus仿真和源码将按键次数写入AT24C02再读出并用1602LCD显示
- SE-SSD复现过程(Det3D的安装教程)
- 基于Python的在线学习与推荐系统设计与实现(论文+源码)-kaic
- 串口通过 YMODEM 协议进行文件传输
- 蓝桥杯2024年第十五届省赛真题-前缀总分
- com.qihoo.appstore_300101305-1.apk
- tensorflow-gpu-2.7.1-cp37-cp37m-manylinux2010-x86-64.whl
- tensorflow-2.7.2-cp37-cp37m-manylinux2010-x86-64.whl
- tensorflow-2.7.1-cp39-cp39-manylinux2010-x86-64.whl
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


