基于
PI
观测器的锂电池
SOC
观测
摘要:随着电动汽车(EDVs)的发
展,锂电池荷电状态
(SOC)
观测变得
越来越重要。在分析了几种基于常用
模型的锂电池
SOC
观测方法的基础上,
提出了基于比例积分(PI)观测器的对
电动汽车锂电池
SOC
观测。分析了所
提出的 PI 观测器的结构,验证了模型
误差下观测方法的收敛性。为了证明
所提出的 PI 观测器的优越性和补偿特
性,采用简单结构
RC
电池模型对锂电
池进行建模。为了验证所提出的基于
PI
的
SOC
观测方法的结果,建立了电
池测试工作台。在验证中,使用了城
市测功机驱动计划
(UDDS)
驾驶周期,
基于 PI 观测器的锂电池 SOC 观测结果
与参考
SOC
一致,无论是已知还是未
知初始 SOC 的情况,误差都在 2%以
内。
关键词:电池;电动汽车;锂电
池;比例积分观测器
(PI)
;滑模观测器;
荷电状态(SOC)。
I.
引言
电动汽车(EDVs),包括电池电动
汽车
(BEVs)
、混合动力汽车
(HEVs)
和
插电式混合动力汽车(PHEVs),在世界
范围内发挥着越来越重要的作用。电
池作为电动汽车中最重要的部件之一,
对电动汽车的性能有很大的影响。锂
电池作为目前电动汽车唯一可行的方
案,越来越受到人们的关注。
作为锂电池的重要指标,荷电状
态
(SOC)
是衡量电动汽车行驶距离的
关键状态。如果能够获得准确的 SOC,
则可以扩展可用的
SOC
范围。因此,
一个更小的电池组将会能够满足目前
配备大型电池组的电动汽车的需要。
因此,电池组的价格可以大幅降低,
进一步促进电动汽车的市场渗透。
然而,锂电池是具有强非线性的
电化学系统,不能过充电或过放电,
以免损坏电池,缩短电池寿命,甚至
引起火灾或爆炸。对这样的强非线性
系统进行建模是非常困难的。绘制无
法直接测量的状态,如电池的
SOC
和
参数,将更加困难。
在以往的文献中已经记载了许多
观测锂电池 SOC 的方法。安培小时计
数法(库伦计数法或电流积分法)计
算电池 SOC 状态简单易行,但它需要
初始
SOC
的先验知识,且存在噪声累
积误差和测量误差[1],[2]。开路电压
(OCV)
法非常准确,但它需要很长的休
息时间来观测 SOC,因此,不能在实
时应用中使用
[1]
。对人工神经网络、
模糊逻辑等智能算法进行了研究,将
电池作为一个黑匣子系统进行了
SOC
观测[3],[4]。这些方法由于具有很强的
逼近非线性函数的能力,通常能够很
好地观测 SOC。然而,学习过程需要
大量的计算且复杂,因此它很难用于
在线应用。
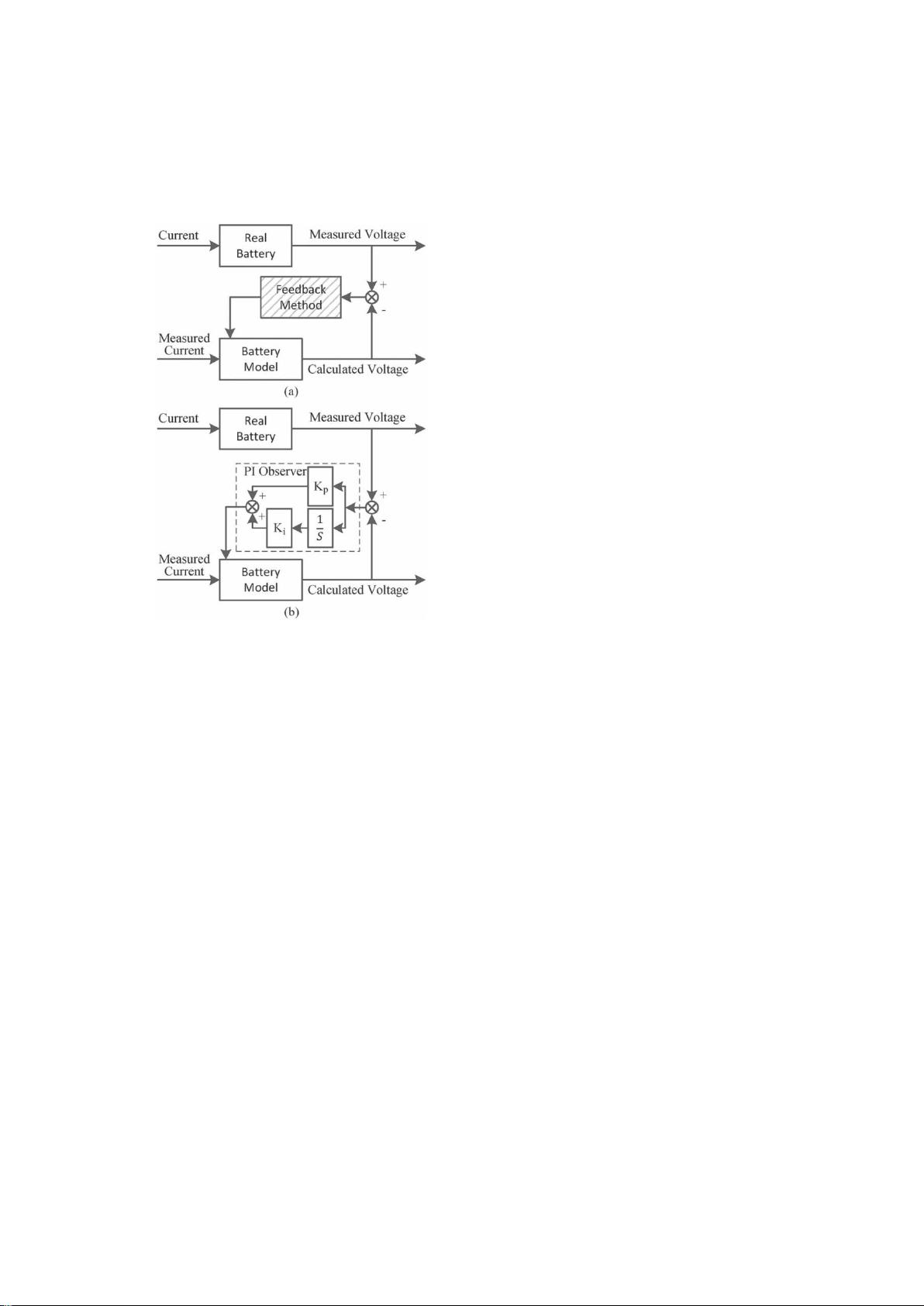
基于电池模型的
SOC
观测方法是
目前最流行的解决方案。主要方法是
将测量的输入信号应用到模型中,并
使用模型的当前和/或过去状态和参数
计算输出。将计算值和测量值之间的
差异或所谓的误差应用于一种算法,
以智能地更新模型状态的测量。这种