IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 55, NO. 5, MAY 2010 1101
Solving Continuous-State POMDPs
via Density Projection
Enlu Zhou, Member, IEEE, Michael C. Fu, Fellow, IEEE, and Steven I. Marcus, Fellow, IEEE
Abstract—Research on numerical solution methods for partially
observable Markov decision processes (POMDPs) has primarily
focused on finite-state models, and these algorithms do not gen-
erally extend to continuous-state POMDPs, due to the infinite
dimensionality of the belief space. In this paper, we develop a
computationally viable and theoretically sound method for solving
continuous-state POMDPs by effectively reducing the dimen-
sionality of the belief space via density projection. The density
projection technique is also incorporated into particle filtering
to provide a filtering scheme for online decision making. We
provide an error bound between the value function induced by
the policy obtained by our method and the true value function of
the POMDP, and also an error bound between projection particle
filtering and exact filtering. Finally, we illustrate the effectiveness
of our method through an inventory control problem.
Index Terms—Belief state, decision making, density projection,
partially observable Markov decision processes (POMDPs), par-
ticle filtering, value function.
I. INTRODUCTION
P
ARTIALLY observable Markov decision processes
(POMDPs) model sequential decision making under
uncertainty with partially observed state information. At each
stage or period, an action is taken based on a partial observation
of the current state along with the history of observations and
actions, and the state transitions probabilistically. The objective
is to minimize (or maximize) a cost (or reward) function, where
costs (or rewards) are accrued in each stage. Clearly, POMDPs
suffer from the same curse of dimensionality as fully observable
MDPs, so efficient numerical solution of problems with large
state spaces is a challenging research area.
A POMDP can be converted to a continuous-state Markov
decision process (MDP) by introducing the notion of the be-
lief state [6], which is the conditional distribution of the cur-
Manuscript received January 04, 2008; revised August 18, 2008. First
published February 02, 2010; current version published May 12, 2010. This
work was supported in part by the National Science Foundation under Grants
DMI-0540312 and DMI-0323220, and by the Air Force Office of Scientific
Research under Grant FA9550-07-1-0366. Recommended by Associate Editor
C.-H. Chen.
E. Zhou is with the Department of Industrial and Enterprise Systems Engi-
neering, University of Illinois at Urbana-Champaign, Urbana, IL 61801 USA
(e-mail: enluzhou@illinois.edu).
M.C. Fu is with the Robert H. Smith School of Business, and Institute for Sys-
tems Research, University of Maryland, College Park, MD 20742 USA (e-mail:
mfu@umd.edu).
S. I. Marcus is with the Department of Electrical and Computer Engineering,
and Institute for Systems Research, University of Maryland, College Park, MD
20742 USA (e-mail: marcus@umd.edu).
Color versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TAC.2010.2042005
rent state given the history of observations and actions. For a
finite-state POMDP, the belief space is finite dimensional (i.e.,
a probability simplex), whereas for a continuous-state POMDP,
the belief space is an infinite-dimensional space of continuous
probability distributions. This difference suggests that simple
generalizations of many of the finite-state algorithms to con-
tinuous-state models are not appropriate or applicable. For ex-
ample, discretization of the continuous-state space may result
in a finite-state POMDP of dimension either too large to solve
computationally or not sufficiently precise. Taking another ex-
ample, many algorithms for solving finite-state POMDPs (see
[17] for a survey) are based on discretization of the finite-di-
mensional probability simplex; however, it is usually not fea-
sible to discretize an infinite-dimensional probability distribu-
tion space. Throughout the paper, when we use the word “di-
mension” or “dimensional,” we refer to the dimension of the
belief space/state.
Despite the abundance of algorithms for finite-state
POMDPs, the aforementioned difficulty has motivated some
researchers to look for efficient algorithms for continuous-state
POMDPs [8], [9], [10], [11], [23], [24], [25], [28], [31]. As-
suming discrete observation and action spaces, Porta
et al.
[24] showed that the optimal finite-horizon value function is
defined by a finite set of “
-functions”, and model all functions
of interest by Gaussian mixtures. In a later work [25], they
extended their result and method to continuous observation and
action spaces using sampling strategies. However, the number
of Gaussian mixtures in representing belief states and
-func-
tions grows exponentially in value iteration as the number of
iterations increases. Thrun [31] addressed continuous-state
POMDPs using particle filtering to simulate the propagation of
belief states and represent the belief states by a finite number of
samples. The number of samples determines the dimension of
the belief space, and the dimension could be very high in order
to approximate the belief states closely. Brunskill et al. [10]
used weighted sums of Gaussians to approximate the belief
states and value functions in a class of switching state models.
Roy [28] and Brooks et al. [8] used sufficient statistics to re-
duce the dimension of the belief space, which is often referred
to as belief compression in the Artificial Intelligence literature.
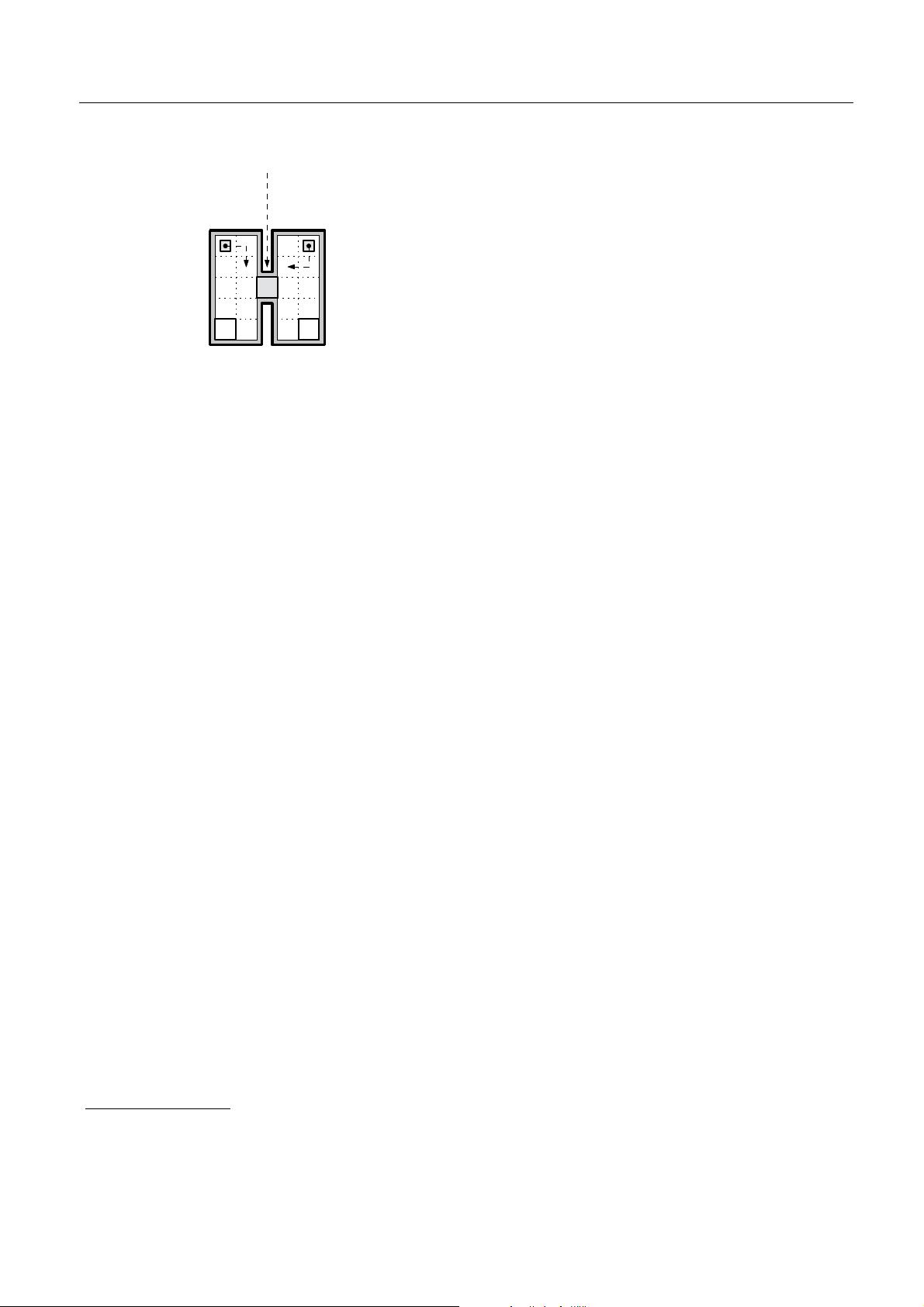
Roy [28] proposed an augmented MDP (AMDP), characterizing
belief states using maximum likelihood state and entropy, which
are usually not sufficient statistics except for a linear Gaussian
model. As shown by Roy himself, the algorithm fails in a simple
robot navigation problem, since the two statistics are not suffi-
cient for distinguishing between a unimodal distribution and a
bimodal distribution. Brooks et al. [8] proposed a parametric
POMDP, representing the belief state as a Gaussian distribution
so as to convert the POMDP to a problem of computing the value
0018-9286/$26.00 © 2010 IEEE
Authorized licensed use limited to: National Univ of Defense Tech. Downloaded on May 29,2010 at 03:02:27 UTC from IEEE Xplore. Restrictions apply.