基于hough变换的车道线识别算法的设计与实现论文.doc
版权申诉
89 浏览量
2023-08-11
08:05:30
上传
评论
收藏 1.02MB DOC 举报


1
目 录
目 录.................................................................................................................................................................1
引言.....................................................................................................................................................................1
1 绪论..................................................................................................................................................................3
1.1 课题背景...............................................................................................................................................3
1.2 课题来源目的和意义...........................................................................................................................3
1.3 主要研究内容......................................................................................................................................3
1.4 国内外研究状况..................................................................................................................................3
2 相关理论知识介绍.........................................................................................................................................6
2.1 matlab 编程...........................................................................................................................................6
2.2 车道偏离预警......................................................................................................................................6
2.2.1 车道偏离预警简介.................................................................................................................6
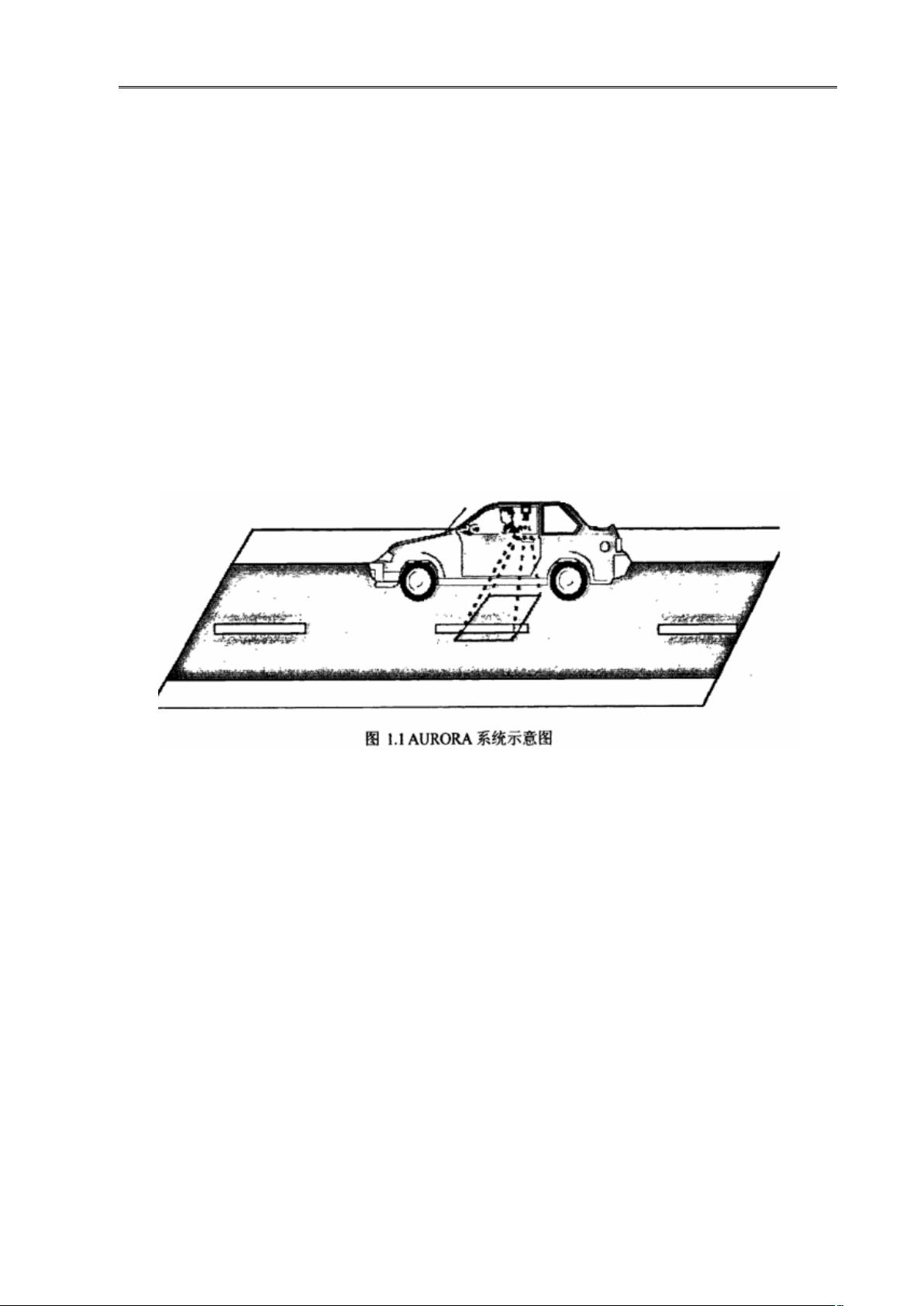
2.2.2 车辆上相机跟踪车道线的工作原理.....................................................................................7
2.2.3 车道偏离预警是怎样预警的.................................................................................................7
2.2.4 车道偏离预警系统为什么不是一直工作...............................................................................8
2.2.5 车道偏离预警的实际效用.......................................................................................................9
2.3 Hough 变换...........................................................................................................................................9
2.4 图像二值化...........................................................................................................................................9
2.5 图像灰度化...........................................................................................................................................9
2.6 图像去噪............................................................................................................................................10
3 设计过程.......................................................................................................................................................11
3.1 主要流程............................................................................................................................................11
3.2 设计过程中的变量.............................................................................................................................12
3.3 设计过程中用到的主要辅助函数.....................................................................................................12
4 系统详细代码设计........................................................................................................................................15
4.1 主系统自定义的一些辅助函数........................................................................................................15
4.1.1 跟踪车道标志线......................................................................................................................15
4.1.2 判断是否出现车道偏离.........................................................................................................16
4.2 主函数................................................................................................................................................18
5 系统结果展示................................................................................................................................................24
结 论...............................................................................................................................................................26
致 谢...............................................................................................................................................................27
引言
现在的生活变得越来越好了,道路上的汽车也开始越来越多。所以汽车也时刻威胁
着人们的安全。根据统计,66%的卡车驾驶人员在行驶过程中睡觉;%的的驾驶员在方向
盘上睡着过的经历。由此可见防止车道偏离的重要意义。
该设计主要完成了车道线的检测和偏离预警。它能够实现对车道线的实时监测并且
汽车偏离了正常的轨迹时,会出现预警提醒驾驶人员回到正常的车道上来,从而对驾驶



剩余27页未读,继续阅读
资源评论













