
1
Abstract – Many indoor robotics systems use laser
rangefinders as their primary sensor for mapping,
localization, and obstacle avoidance. The cost and power of
such systems is a major roadblock to the deployment of low-
cost, efficient consumer robot platforms for home use. In
this paper, we describe a compact, planar laser distance
sensor (LDS) that has capabilities comparable to current
laser scanners: 3 cm accuracy out to 6 m, 10 Hz acquisition,
and 1 degree resolution over a full 360 degree scan. The
build cost of this device, using COTS electronics and custom
mechanical tooling, is under $30.
I. INTRODUCTION
One of the most common tasks for mobile robots is to
make a map and navigate in an environment. To do so,
the robot needs to sense its environment in an efficient
way, looking out to some distance to find obstacles and
build a map that is useful for performing tasks such as
vacuuming or delivery.
While there are many sensors that could be used, laser
distance sensors are currently the standard sensor in
indoor and outdoor mobile robots. The main reason is the
utility of the data: an LDS returns distance to objects in its
field of view, unlike (for example) vision sensors, which
need complicated and error-prone processing before
distances are measured. And unlike other distance sensors
such as sonars or IR sensors, an LDS is capable of fine
angular and distance resolution, realtime behavior
(hundreds or thousands of point measurements per
second), and low false positive and negative rates.
Efficient algorithms exist for mapping and localization
using LDS scans [5][8].
While LDS devices are ubiquitous in research robotics,
their high cost has kept them from appearing in consumer
robotics such as robot floor cleaners. The Electrolux
Trilobite, one of the only cleaners to make a map, relies
on sonar sensors [13].
2
The barrier to using LDS
technology is the cost. The two most common devices,
the SICK LMS 200 [1] and the Hokuyo URG-04LX [1],
cost an order of magnitude more than the simplest robot
Manuscript received September 14, 2007. Revised February 4, 2008.
K. Konolige is with SRI International, Menlo Park, CA 94025 USA
(phone: 650 859-2788; fax: 650 859-3735; e-mail: konolige@ai.sri.com).
J. Augenbraun, N. Donaldson, C. Fiebig, and P. Shah are with Neato
Robotics, Menlo Park, CA 94025 USA (e-mail: joe, nick, charles,
pankaj@neato.com).
2
The Samsung VC-RP30W apparently makes a map, but there are no
details available on how it does this.
cleaners.
In this paper we describe a compact, low-cost LDS that
is as capable as standard LDS devices, yet is being
manufactured for a fraction of their cost: the Revo LDS.
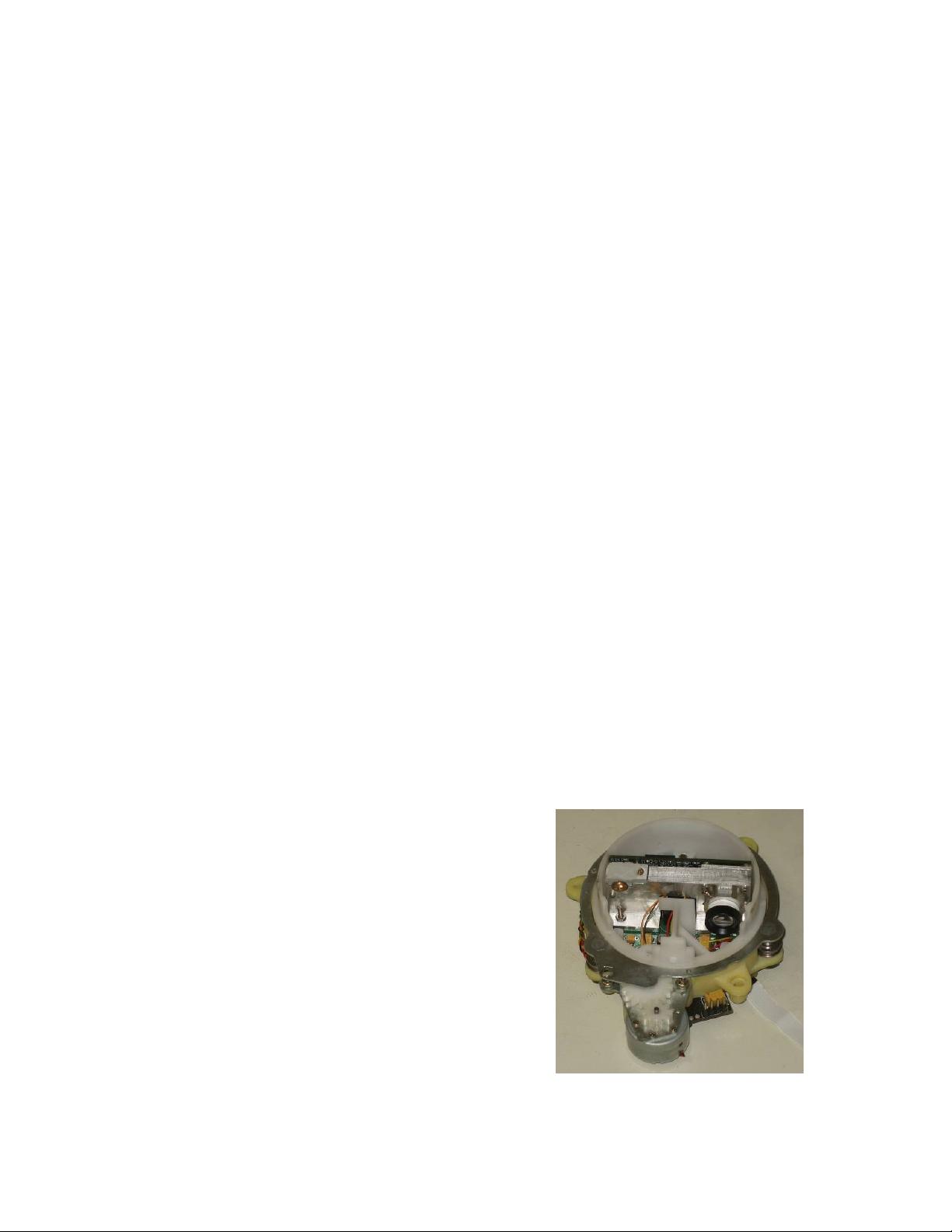
Figure I-1 shows the prototype Revo with its cover
removed. It has the following characteristics:
1. Eye-safe (Class I or II).
2. Works under standard indoor lighting conditions,
and some outdoor conditions.
3. Measures a full 360 degree planar scan.
4. Has a range from 0.2m to 6m.
5. High resolution: range error < 3 cm at 6 m, angular
resolution of 1 degree.
6. 4000 readings per second (scans up to 10 Hz)
7. Small size, low power (< 2W)
8. Standard, commercially-available components.
9. Low cost: $30 cost to build.
These characteristics make the Revo suitable for consumer
products, and open the way for high-performance, low-
cost mobile robots. Although all of the Revo technologies
have been used in other devices, to date no-one has
realized that they could be combined to make a low-cost,
high-performance sensor. Achieving the above criteria
required innovations in design, algorithms, and
integration. The key elements of the Revo are –
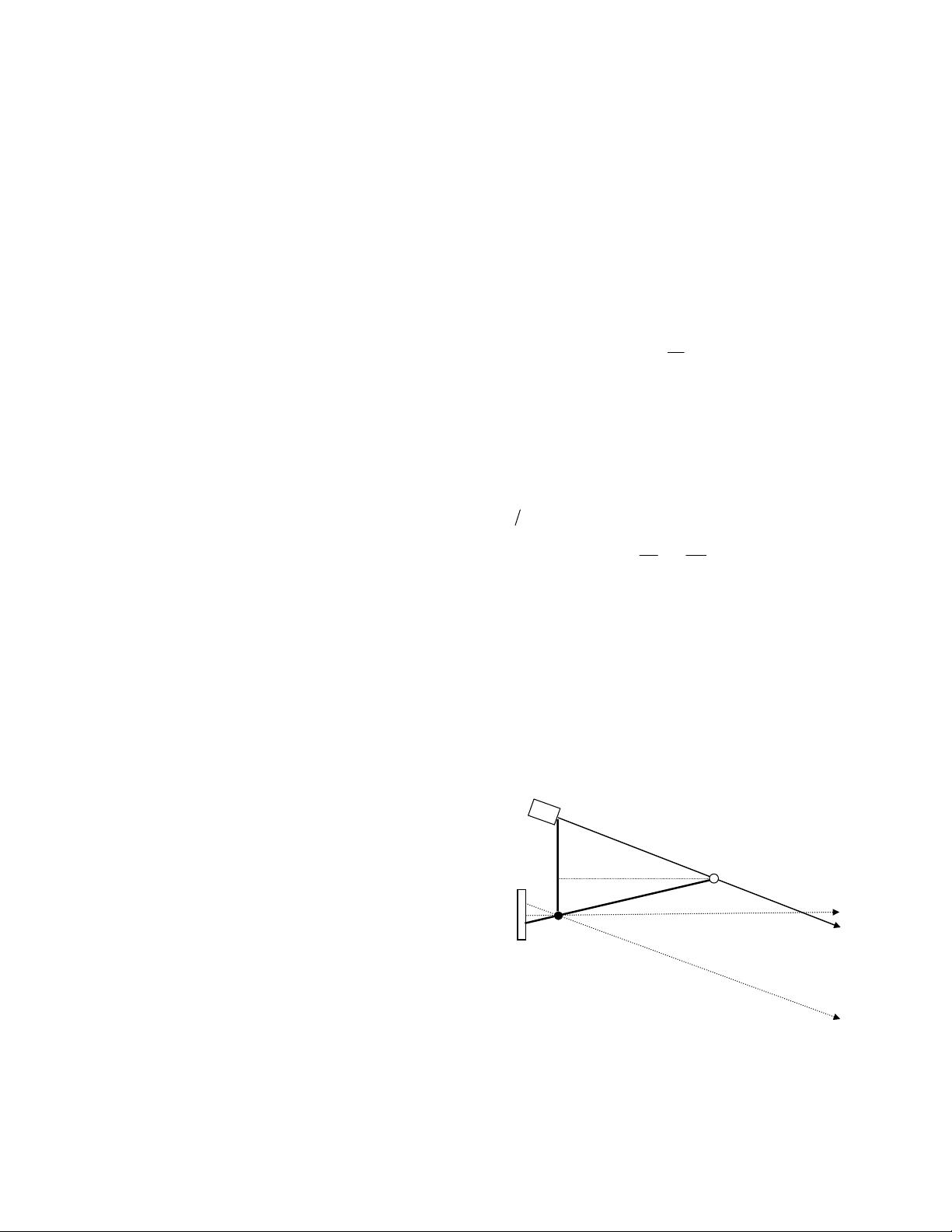
• A compact, rigid point-beam triangulation module
incorporating laser, imager, and electronics. With a
low-cost CMOS imager and a DSP for subpixel
interpolation, we get good range resolution out to 6 m
Figure I-1 Revo LDS. Approximate width is 10cm. Round carrier
spins, holds optical module with laser dot module, imager, and lens.
A Low-Cost Laser Distance Sensor
Kurt Konolige, Joseph Augenbraun, Nick Donaldson, Charles Fiebig, and Pankaj Shah
2008 IEEE International Conference on
Robotics and Automation
Pasadena, CA, USA, May 19-23, 2008
978-1-4244-1647-9/08/$25.00 ©2008 IEEE. 3002
Authorized licensed use limited to: Guangdong Univ of Tech. Downloaded on January 19, 2010 at 08:56 from IEEE Xplore. Restrictions apply.
剩余6页未读,继续阅读
资源评论


zhaojinpeng111
- 粉丝: 0
- 资源: 2









最新资源
- 系统架构设计师2021年11月考点精讲-第一节21-41题讲义.pptx
- 系统架构设计师2021年11月考点精讲-第一节42-61题讲义.pptx
- 系统架构设计师2021年11月考点精讲-第一节62-75题讲义 .pptx
- gb-a3.slddrw
- 精选微信小程序源码:生鲜商城小程序(含源码+源码导入视频教程&文档教程,亲测可用)
- CISP相关试题都在这里,大家快来看啊
- ISO 13400-2:2012(E)
- 精选微信小程序源码:仿淘票票小程序(含源码+源码导入视频教程&文档教程,亲测可用)
- FCRP模拟试卷-参数联动个性化展示结果
- 离线仓库在企业内部署的技术指南与配置流程
- 精选微信小程序源码:同乐居商城小程序(含源码+源码导入视频教程&文档教程,亲测可用)
- 纯电动汽车:预计2024年我国纯电动汽车销量756.8万辆,潜力无限
- 基于OpenCV的手势识别人机交互系统
- 浅谈PostgreSQL与MySQL的历史演变及关键技术对比
- SW+GB材质数据库 & 文件模板
- 疑似北京平面坐标转84坐标方式探索
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


