同济大学作为我国著名的高等学府,其机械学科在国内外享有盛誉。《同济大学机械原理总复习PPT》作为复习该门课程的必备资料,对于希望在机械原理方面深入学习的学生来说,无疑是一份宝贵的资源。本文将围绕《同济大学机械原理》课程的主要内容,即机构的结构分析、平面机构的运动分析以及平面连杆机构及其设计,展开深入探讨。
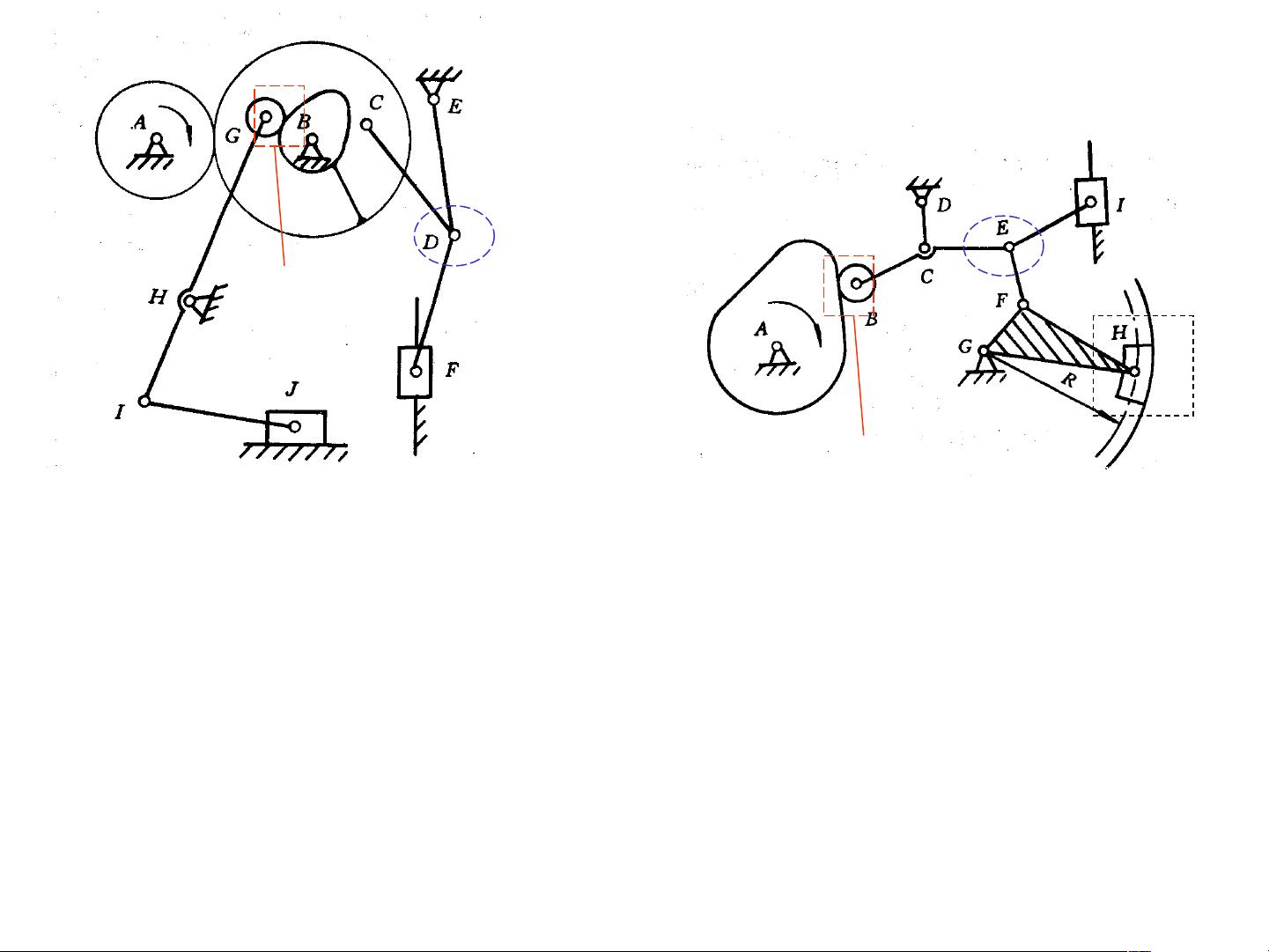
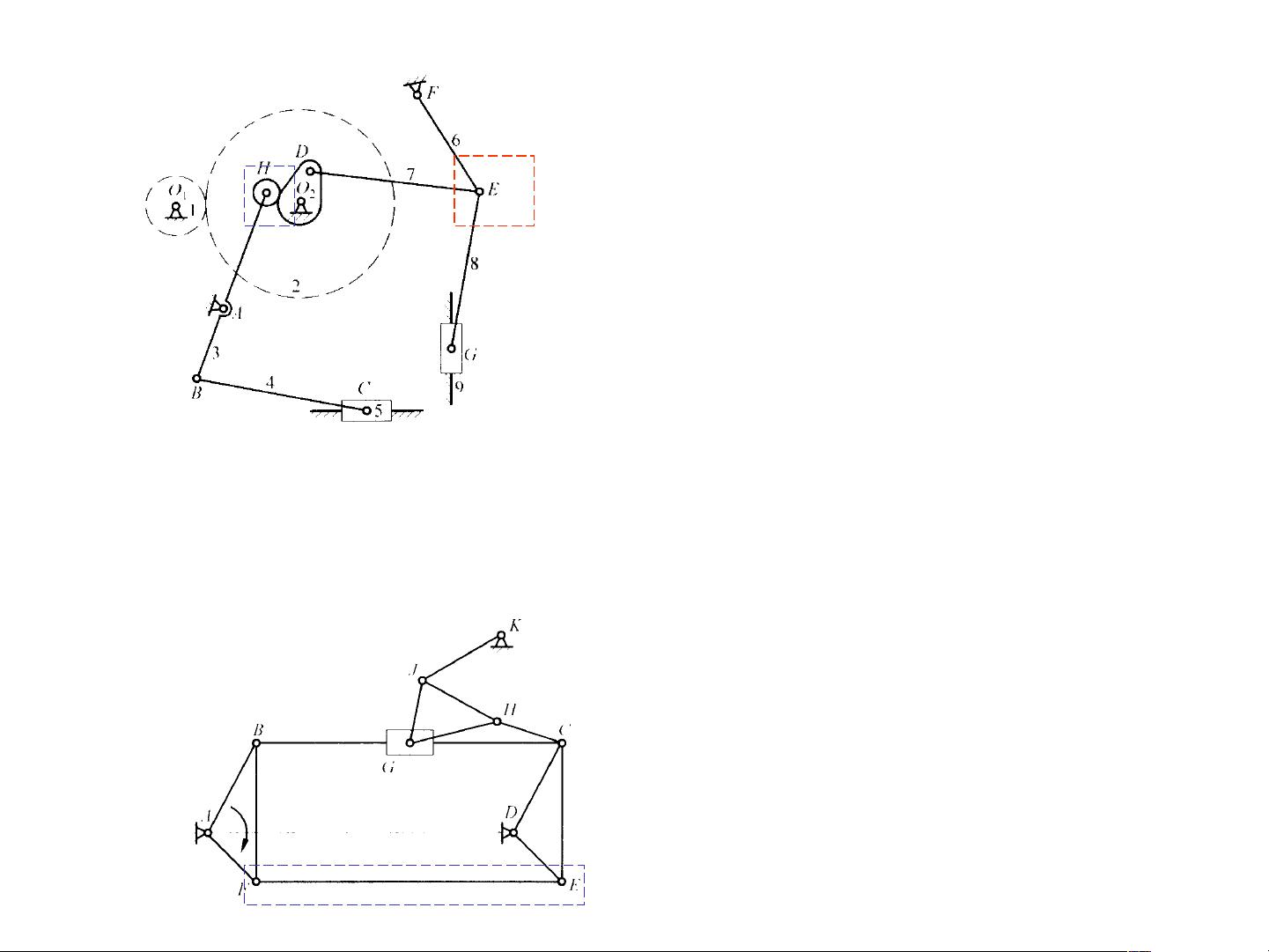
对于机构的结构分析,这是机械原理课程中的基础部分。在这一部分中,我们首先要了解机构的基本构成要素,即构件、运动副和运动链。构件是构成机构的基本单元,运动副则为构件之间的连接提供了相对运动的可能,而运动链则是由多个构件和运动副组合而成的整体。在了解了这些基本概念之后,我们进一步学习如何计算机构的自由度。自由度是描述机构运动灵活性的重要参数,它与机构的复杂程度密切相关。在计算自由度的过程中,我们涉及到了局部自由度、虚约束以及复合铰链等概念。例如,通过特定的公式,我们可以求解出机构的自由度,其中涉及到了高副、低副以及铰链的数量,以及构件数和原动件数等参数。此外,通过对杆组的拆分,我们能够更加准确地判断机构的级别和复杂程度。
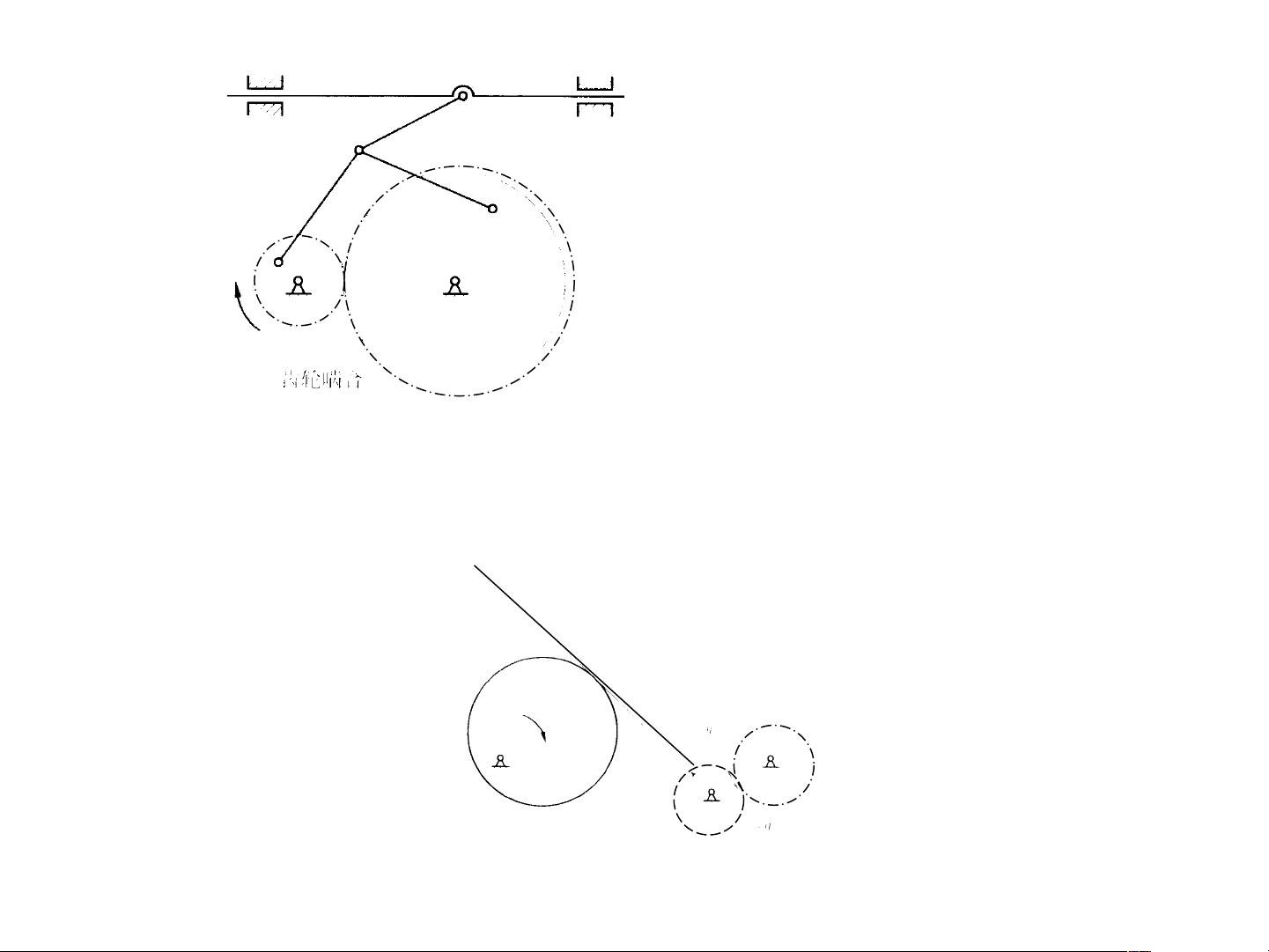
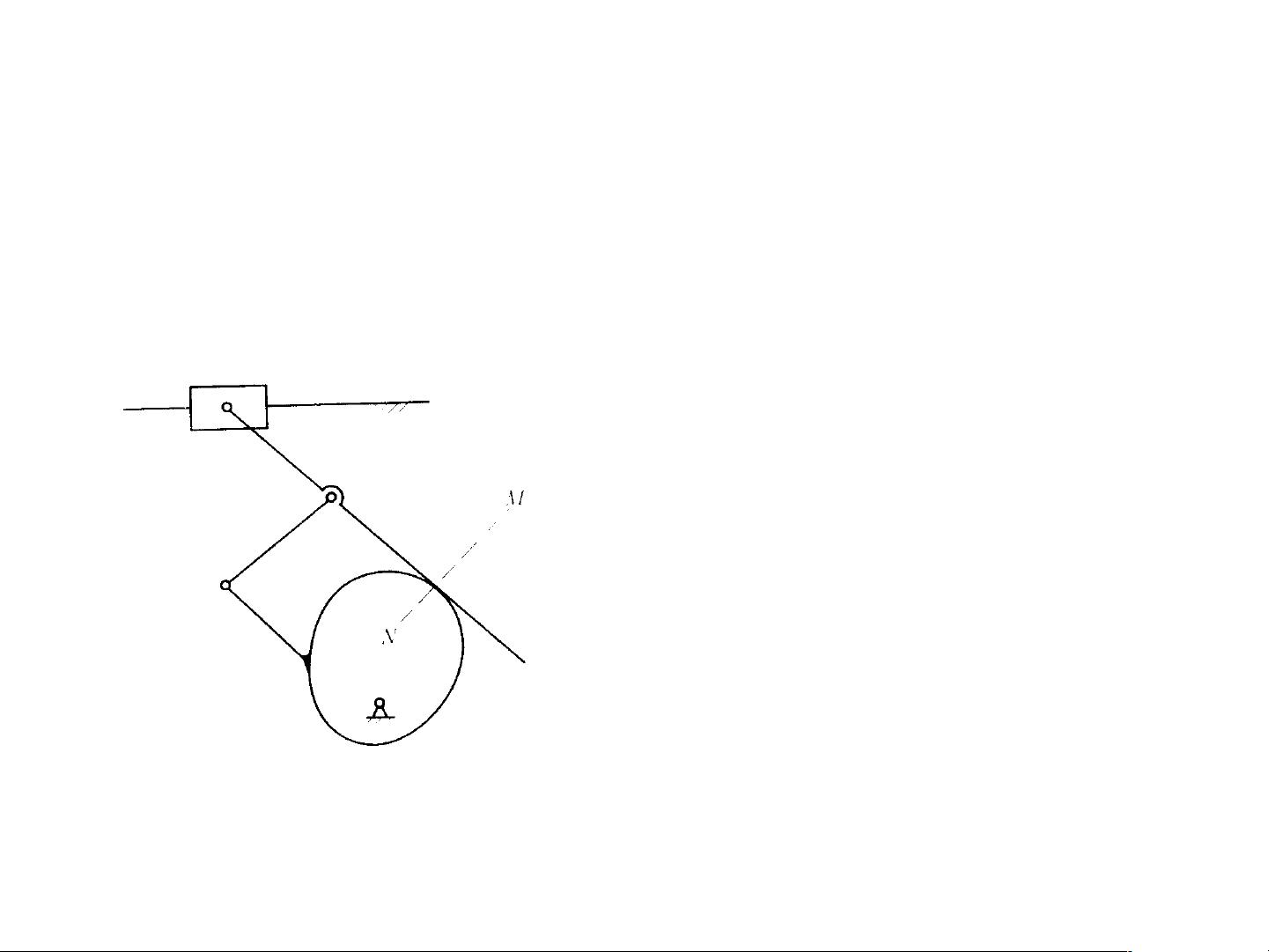
接下来,在平面机构的运动分析部分,我们学习到了多种分析方法,如速度瞬心法、矢量方程图解法和三心定理等。速度瞬心是指两个构件相对运动速度方向相切的点,通过找到速度瞬心,我们可以求解出构件的速度和加速度。速度瞬心的概念,不仅对于理解机构中构件的运动非常有帮助,还能够应用于解决实际的工程问题。而矢量方程图解法则提供了一种图形化的方法来描述构件间的速度和加速度关系,这对于直观理解复杂的运动关系尤其有用。例如,当知道了某些构件的角速度后,我们可以用矢量方程图解法求出其他构件的速度和加速度。这些分析方法不仅让学习者能够更好地理解理论,也为实际应用提供了强有力的工具。
在平面连杆机构及其设计部分,我们的重点放在了四杆机构上。四杆机构是平面连杆机构中最常见、最基本的一种形式,它包含一个曲柄和一个连杆。在这一部分中,我们学习了四杆机构的基本型式,如曲柄摇杆机构、双曲柄机构等,以及它们的演化型式,例如通过改变杆长或连接方式得到的不同变型。设计四杆机构时,需要综合考虑多个因素,如曲柄存在的条件、行程速比系数K、传动角以及死点问题。其中,行程速比系数K涉及到构件运动的快慢和行程的长短,传动角则直接影响到机构的传动效率。曲柄摇杆机构设计的作图法是一个典型例子,它帮助我们确定四杆机构中构件的最大摆角和最短构件的位置,从而确保机构能够稳定有效地运行。
《同济大学机械原理总复习PPT》为我们呈现了一份详尽的机械原理复习资料。它不仅全面覆盖了机构原理的基础知识,更深入探讨了机构设计和分析的复杂问题。无论是对于参加研究生入学考试的考生,还是对于希望深化机械原理知识的学生和专业人士来说,这份PPT都是一份不可多得的宝贵学习资料。通过本篇复习PPT的学习,学习者不仅能够掌握机械原理的核心知识,还能够在此基础上,解决更为复杂和实际的工程问题,为未来的研究和工作打下坚实的基础。







评论1
最新资源