随着工业自动化水平的不断提升,可编程逻辑控制器(PLC)已广泛应用于各种自动控制系统中。其中,PLC在机械手控制领域的应用尤为突出,它以其可靠性高、编程灵活、易于扩展和维护等优势,在自动化生产线上扮演着至关重要的角色。下面,我们将深入探讨如何利用PLC技术来控制机械手的运动。
我们需要了解机械手的基本动作组成。在自动化应用中,机械手的动作一般可以分解为上升、下降、左移和右移四个基本动作。为了实现这些动作,机械手往往配备有气缸和电磁阀。气缸通过电磁阀控制的气流推动活塞伸缩,带动机械手相应部位的移动。例如,通过控制电磁阀的通断,可以实现气缸的伸缩,进而控制机械手的上升和下降。
进一步,我们将介绍PLC在机械手控制中的具体应用。机械手的运动控制过程涉及对电磁阀的精确控制。在某个自动化任务中,机械手可能会被设计为从A点拾取工件,然后上升至顶部,水平移动到B点,最后下降并释放工件。这个过程中的上升、下降、左移和右移等动作,需要PLC根据预先设定的控制逻辑来控制相应的电磁阀。
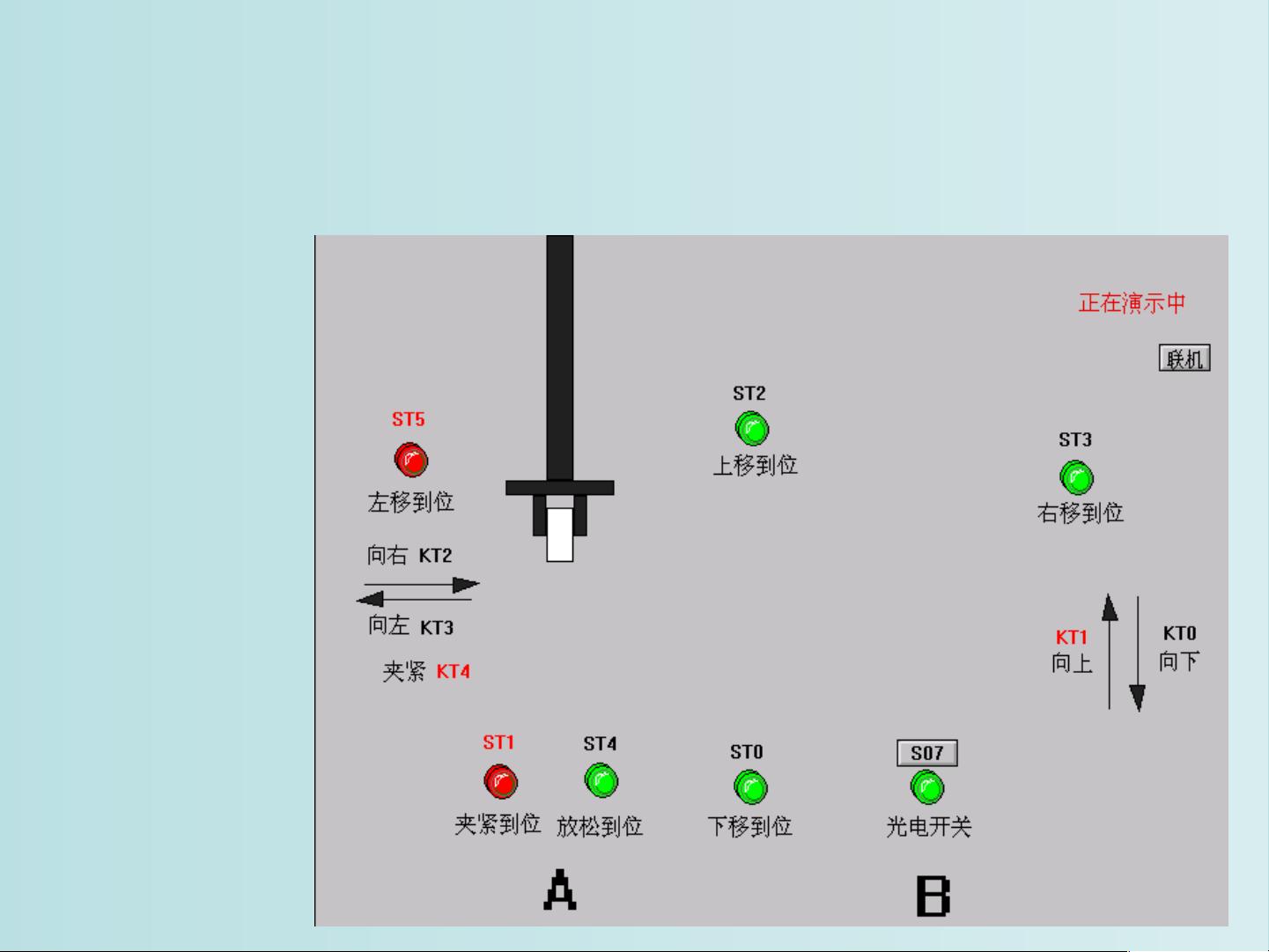
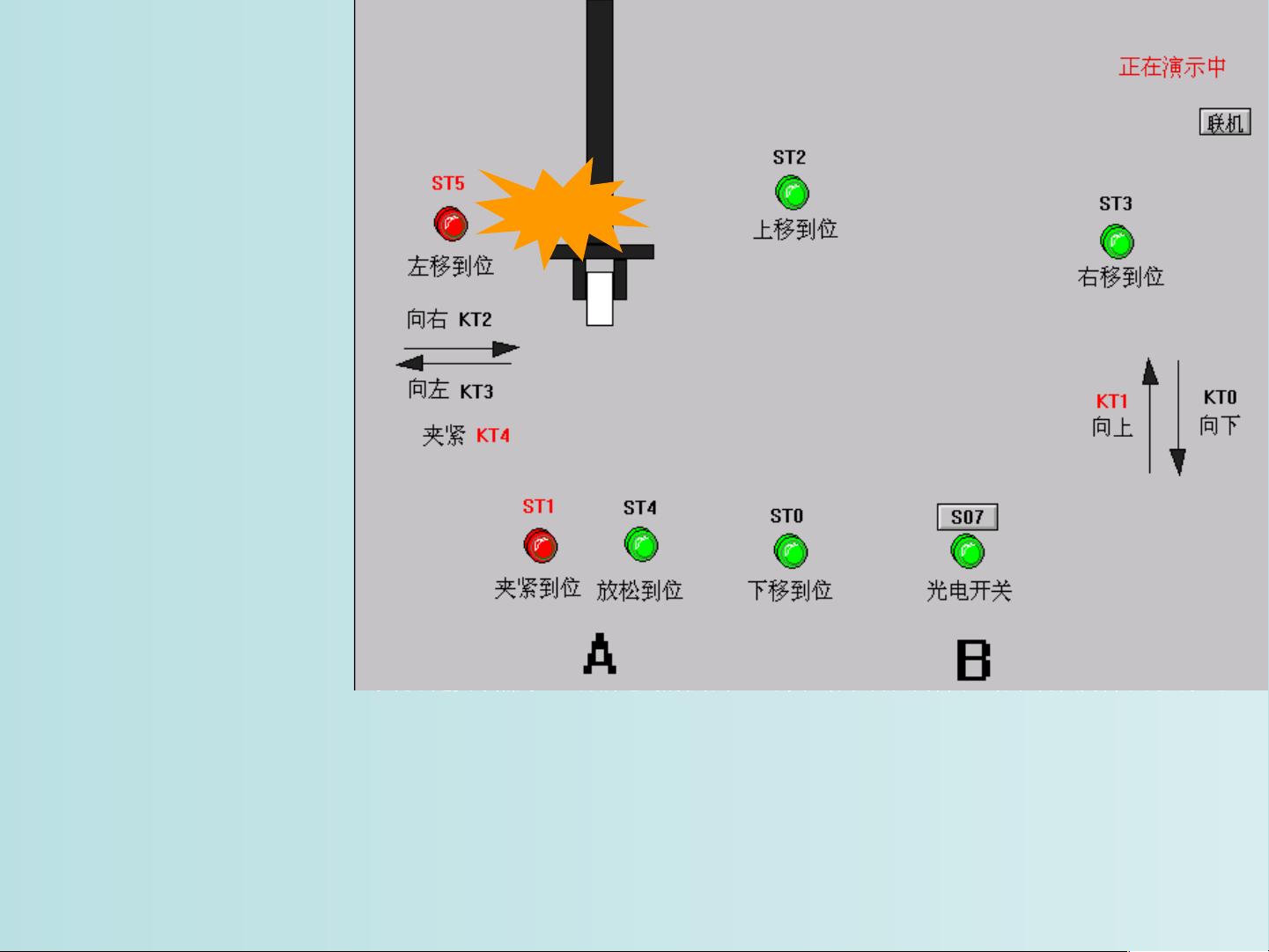
为了确保操作的安全性,通常会使用各种传感器来进行状态监测。例如,光电开关可以用来检测B点是否有工件的存在,以避免机械手错误释放工件导致的事故。当光电开关检测到B点无工件时,PLC才会发出信号让机械手下放。
在控制系统的设计中,还需考虑机械手的启动和停止机制。启动按钮(SB1)和停止按钮(SB2)是操作员与PLC控制系统之间的主要交互接口。启动按钮通常用于启动一次或多次预设的搬运循环,而停止按钮则允许操作员在任何时候中断机械手的运动。若按下启动按钮SB1,机械手将连续执行三次搬运循环,然后自动停止。若在某个循环进行中按下停止按钮SB2,则机械手将在完成当前循环后停止。
PLC的输入端口和输出端口是其与外界交互的关键。PLC的输入端口接收来自各种传感器的信号,例如下降到位、夹紧到位等状态信号;而PLC的输出端口则控制如下降电磁阀、上升电磁阀等执行器。设计PLC程序时,对这些输入输出信号的管理是确保系统稳定运行的基础。
编写PLC程序时,梯形图和语句表编程是最常用的两种方法。根据工艺流程图和控制要求,工程师需编写相应的程序代码,并将其输入到PLC中。在实际应用前,通过在考核箱上接线,并使用电脑软件进行模拟仿真调试,可以确保程序逻辑的正确性,并符合工作要求。
流程图和状态转换图作为辅助工具,在设计和理解控制逻辑方面发挥着重要作用。这些图表可以帮助工程师直观地了解和设计系统的运行状态转换和控制逻辑。例如,不同的输入状态(如X1、X4、X6、X7等触点)将决定机械手的下一步动作。在使用PLC仿真软件进行调试时,每个触点是否需要参与调试也会成为关注的焦点。
掌握PLC控制机械手的基础知识是实现工业自动化的重要前提。无论是机械手的运动控制、安全检测、程序设计,还是系统调试,每一个环节都不可忽视。随着工业技术的不断发展,对PLC控制系统的理解和应用能力将变得越来越重要,这需要工程师们不断学习和实践,以适应自动化技术的飞速发展。















评论0