机器人灵巧手的发展历程及未来发展方向探讨
需积分: 0 73 浏览量
2024-05-10
17:33:04
上传
评论
收藏 5.46MB DOC 举报

1.什么是机器人灵巧手?
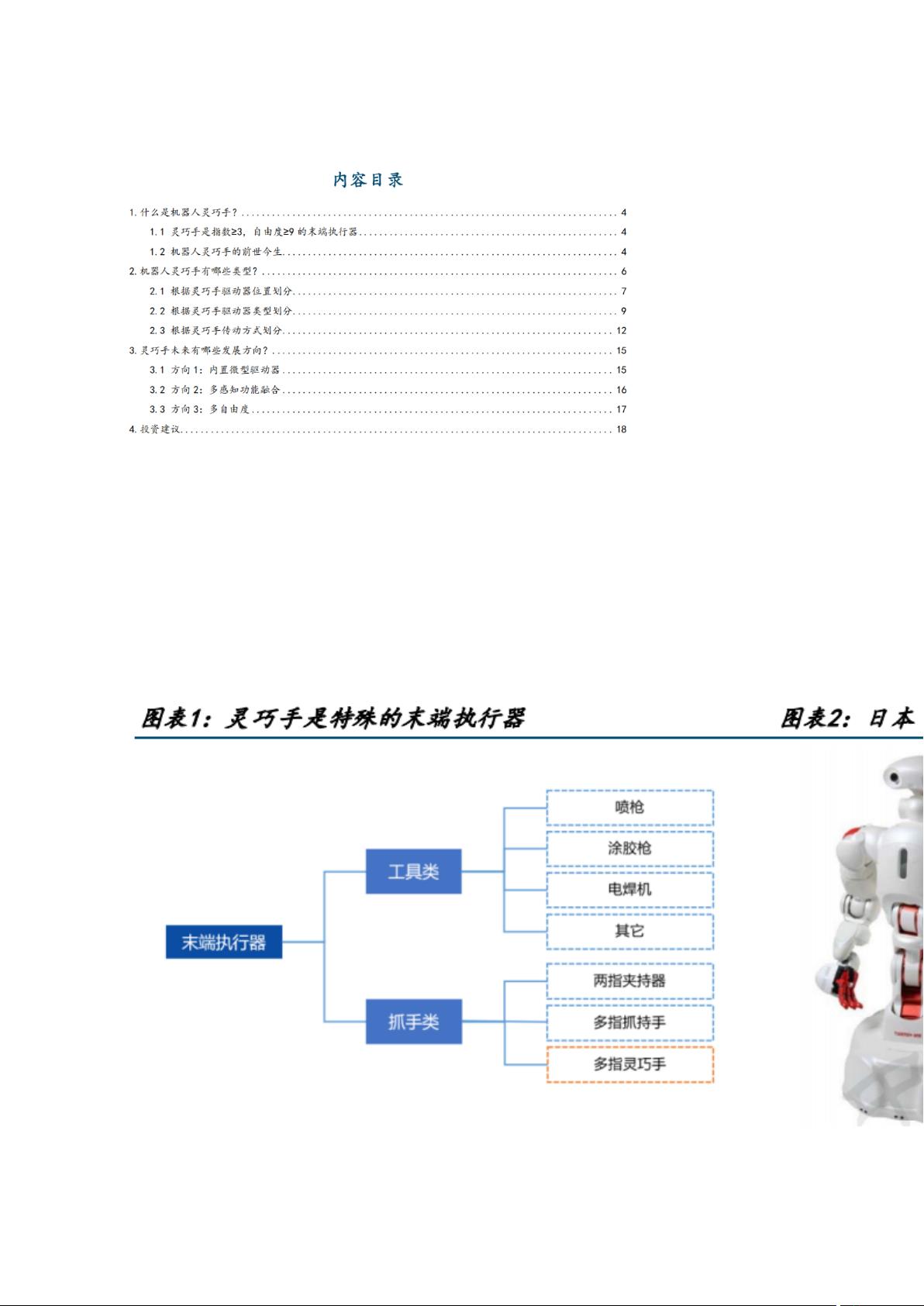
1.1 灵巧手是指数≥3,自由度≥9 的末端执行器
灵巧手是机器人操作和动作执行的末端工具,在机器人学领域属于末端执行器的范
畴。从运动学的观点看,灵巧手需满足两个条件:指关节运动时能使物体产生任意运
动、指关节固定时能完全限制物体的运动,按照运动学理论,满足上述条件至少要 3
个手指和 9 个自由度。因此,我们定义灵巧手是指数≥3,自由度≥9 的末端执行
器。例如日本的 TWENDY-ONE 机器人,其灵巧手拥有 4 根手指和 13 个自由度。
1.2 机器人灵巧手的前世今生



剩余23页未读,继续阅读
资源评论


yuxingwu9872
- 粉丝: 760
- 资源: 175











