1
High-Accuracy Indoor Geolocation using
Collaborative Time of Arrival
Leor Banin, Ofer Bar-Shalom, Nir Dvorecki, and Yuval Amizur
Abstract—Collaborative time of arrival (CToA) is the next
generation, indoor geolocation protocol, which is designed for
enabling scalability of the existing IEEE802.11/Wi-Fi-based, ge-
olocation systems. The protocol leverages on the IEEE802.11 fine
timing measurements (FTM) capabilities, enabled in state-of-
the-art Wi-Fi chipsets, and supports two concurrent operation
modes; the CToA “client-mode” enables “GPS-like” operation
indoors, and allows an unlimited number of clients to privately
estimate their position and navigate indoors, without exposing
their presence to the network. The CToA “network-mode” is
designed for large-scale asset-tracking applications, and enables
a centric positioning server to pinpoint objects equipped with
wireless, Wi-Fi-based, low-power electronic tags (e-Tags).
The CToA protocol is a broadcast-based protocol that operates
over an un-managed network, built out of cheap, unsynchronized
units called “CToA broadcasting stations” (bSTA). The bSTAs,
which are stationed at known locations, periodically broadcast
a unique beacon transmission and publish its time of departure
(ToD). Neighbor bSTA units and clients that receive the beacon
broadcast, measure and log its time of arrival (ToA). Every bSTA
publishes its most recent timing measurement log as part of its
next beacon broadcast. CToA clients combine their own ToA
measurements with those published by the bSTAs, in order to
estimate and track their location. CToA e-Tag clients act similar
to bSTAs, and simply wake-up sporadically to broadcast a CToA
beacon. The ToA of that broadcast is measured and logged by the
receiving bSTAs similarly to beacons broadcast by other bSTAs.
The timing measurement report is then delivered to a centric
positioning server that can estimate and track the location of
numerous CToA-based e-Tags, simultaneously.
The paper outlines the principles of the CToA protocol and the
mathematical background of the position estimation algorithms.
In addition, performance examples as well as theoretical analysis
of the expected positioning accuracy are provided.
Index Terms—geolocation, Indoor navigation, fine timing mea-
surement, FTM, time delay estimation, Maximum likelihood
estimation, WLAN, Wi-Fi, IEEE 802.11
I. INTRODUCTION
T
HE challenge of accurate indoor location and navigation
has been attracting an increasing amount of attention
since the mid 1990’s. Cultivated by the cellular revolution and
the U.S. federal communication committee (FCC) enhanced
911 services (E911) [1], indoor location has ignited a rapid
development of mobile location technologies. The ubiquity of
IEEE802.11
TM
wireless local area network (WLAN) technol-
ogy in mobile devices, which to date, has already reached an
attach-rate of 100% in the smart-device segment [2], facilitated
the development of WLAN-based indoor location systems.
Due to the lack of standard infrastructure for high-resolution
timing measurement capabilities in its early releases, existing
L. Banin, O. Bar-Shalom, N. Dvorecki and Y. Amizur are with Intel’s
Location Core Division, 94 Em Hamoshavot Rd., Petah Tikva 49527, Israel.
Corresponding author’s e-mail: oferbarshalom@gmail.com.
WLAN-based location technology relies, to a great extent, on
the WLAN received signal strength indicator (RSSI) infras-
tructure. The RSSI is a measure of the RF energy received by
the station. WLAN stations estimate the RSSI of the beacons
broadcast by access points (AP), and use this metric to sort
between the APs based on their signal quality and proximity.
The RSSI metric is measured in units of [dBm], and in general
is inversely proportional to the logarithm of the squared
distance between the transmitter and the receiver [16]. RSSI-
based mobile device positioning exists in two main flavors:
path-loss models, and “fingerprinting”. Path-loss models relate
the received signal power to the propagation distance. A set
of RSSI measurements obtained from different WLAN APs
in the vicinity of the client station, enable it to estimate its
position via trilateration methods [18], [19]. While this method
is relatively simple to implement, it is prone to yield fairly
inaccurate positioning results due to the large variations in the
RSSI measurements [6]. The alternative approach is to corre-
late the RSSI measurements against a pre-calibrated database
of RSSI “fingerprints”, measured over a pre-defined grid and
stored in a server. The fingerprint approach provides better
accuracy compared to the path-loss based RSSI. However, as
the method’s accuracy is sensitive to even minor changes in
the propagation channel (e.g., a placement of a new sales-stand
in a shopping mall), frequent re-calibrations and updates of
the fingerprints database are required. The high-maintenance
incurred by this type of positioning systems obviously limits
their scalability.
Facing the limited positioning accuracy enabled by
RSSI/path-loss based location technologies and the limited
scalability of fingerprint-based systems, industry vendors be-
gan seeking alternative WLAN-based positioning technolo-
gies, which will enable to achieve higher positioning accuracy.
Taking advantage of the high bandwidth supported by the
WLAN systems (ranging between 20-160 MHz), the approach
pursued was geolocation based on time-delay estimation [11].
Though the early releases of the IEEE802.11
TM
standard
included means for time delay estimation, the timing resolution
enabled by these mechanisms was in the microseconds level
- too coarse for any practical indoor positioning applications.
High-accuracy positioning in a dense multipath environment
imposed several hardware design changes in the existing
WLAN chipsets, in order to increase the timing resolution
from the microseconds level to the nanosecond level (or
even sub-nanosecond level). The solution that was endorsed
by the IEEE802.11
TM
group, was a novel time-delay based
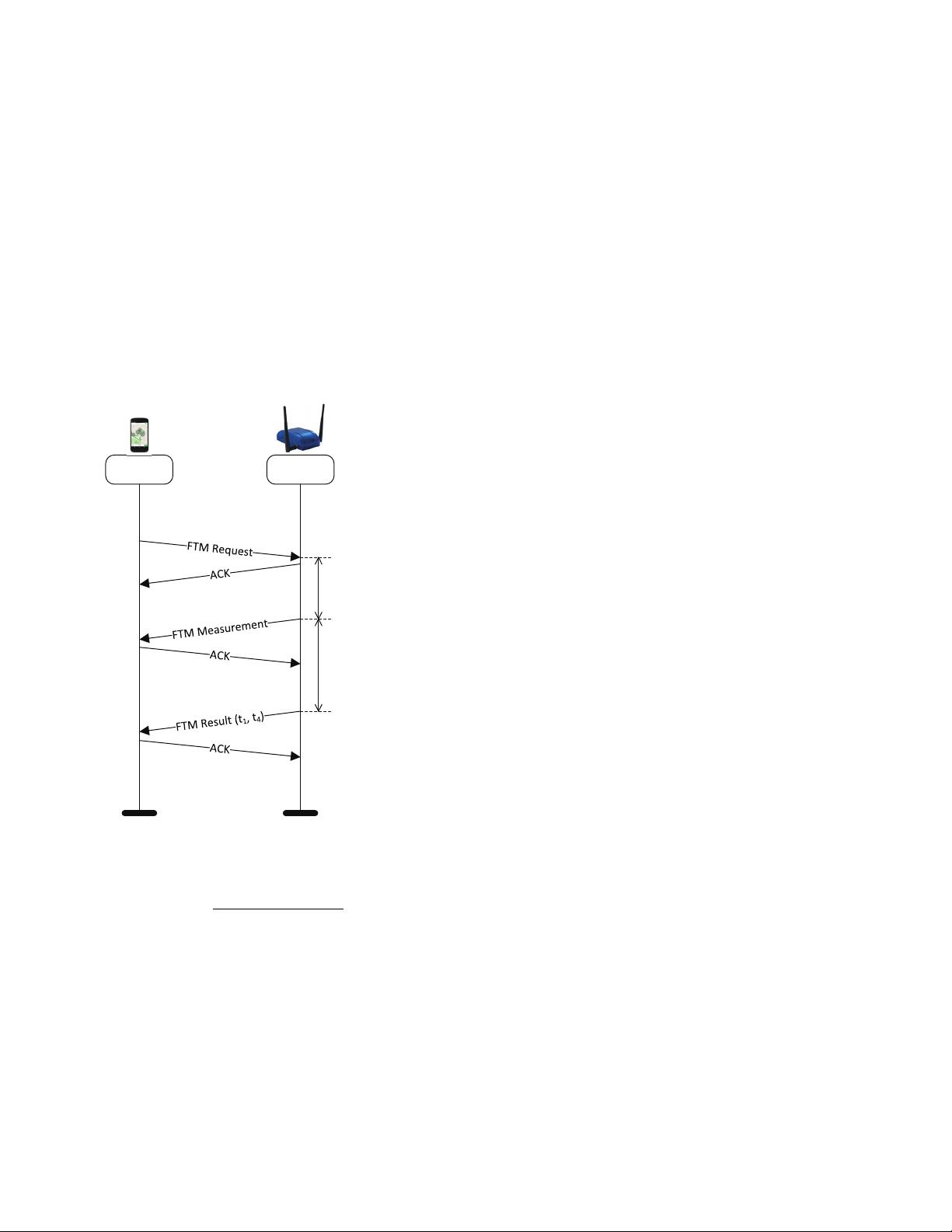
ranging protocol called “fine-timing measurement” (FTM).
The FTM protocol enables a WLAN station to measure its