
Time-Dependent Dynamics in
Networked Sensing and Control
Justin R. Hartman, Michael S. Branicky, and Vincenzo Liberatore
Electrical Engineering and Computer Science Department
Case Western Reserve University, Cleveland, OH 44106
jjhartman@ra.rockwell.com, {mb,vincenzo.liberatore}@case.edu
Abstract— A networked sensing and control system (NSCS)
combines networked sensors with control and actuation units
so as to control a physical environment. An NSCS can effec-
tively use sensing and control signals only if those signals are
delivered on time. The paper analyzes the behavior of an NSCS
as a function of network real-time service. In particular, we
consider the range of effective sampling periods and network
delays that lead to stability for the controlled physical plant.
A high-level conclusion is that the actual stability region is
affected by the time-dependent behavior of packet delays and
losses and can differ from an idealized stability region derived
from an aggregate view of the loss and delay processes.
I. INTRODUCTION
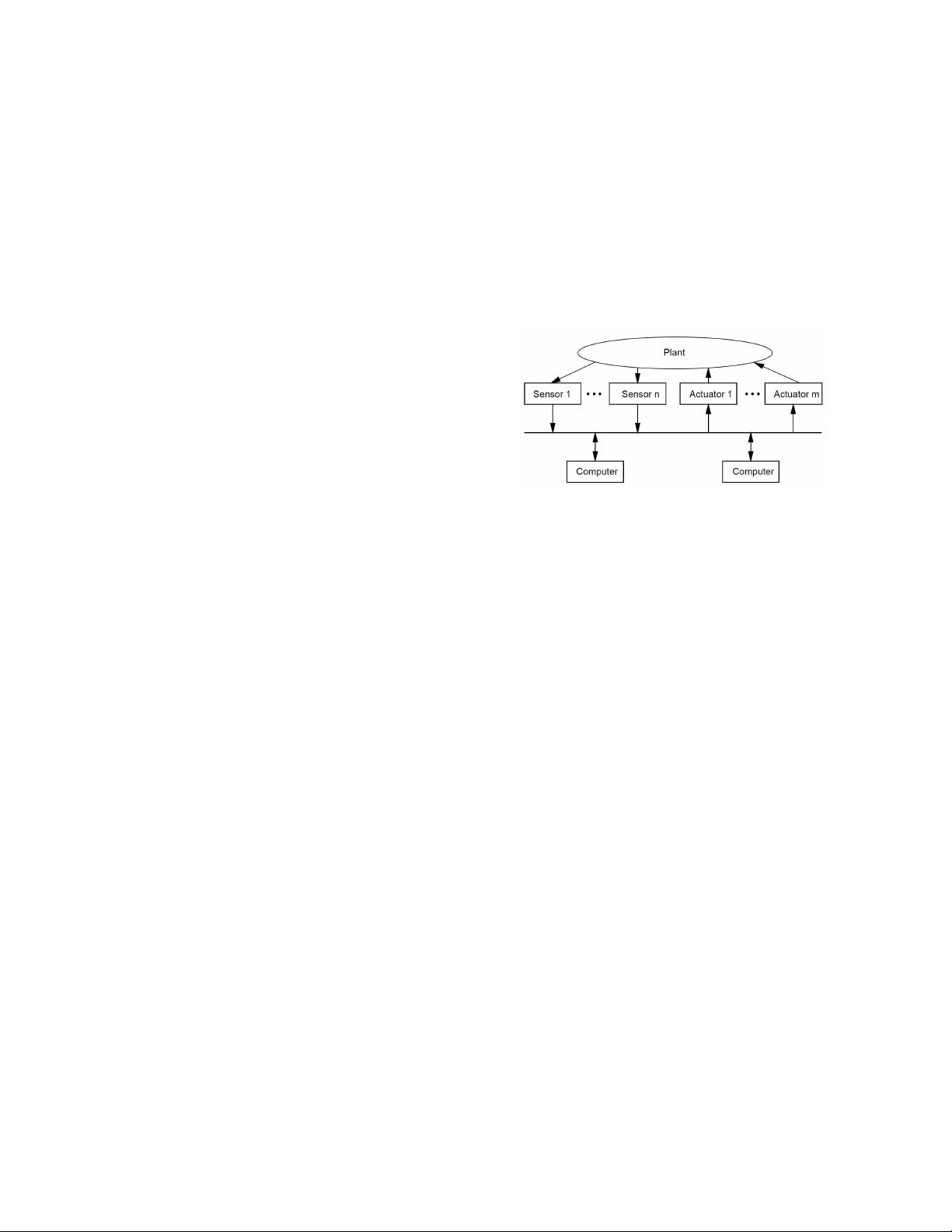
A networked sensing and control system (NSCS) com-
bines networked sensors with control and actuation units so
as to control a physical environment (Fig. 1). Applications
are far-reaching and include, for example, industrial au-
tomation and distributed instrumentation [1]. A fundamental
problem in NSCS is that sensor and control signals are
useless or dangerous if they are delivered too late. In
particular, a late control can jeopardize the stability, safety,
and performance of the controlled physical environment. As
a result, the physics of an NSCS critically depends on the
real-time network behavior.
A broad research objective is to establish a methodology
and the theoretical underpinnings of networked control [8].
In this paper, we analyze and simulate a representative
physical system on simple topology. Our primary objective
is to ascertain to what extent the complexity of time-varying
network dynamics can be incorporated into a control-
theoretical model. The paper focuses on packet-switched
sensor networks because they are in widespread use in
industrial automation and because the analysis is simpler
than in an ad-hoc network.
In Section II, we introduce the NSCS that will be an-
alyzed throughout the paper. Section III frames the main
analytical properties of this NSCS, including the stability
region and the traffic locus. In Section IV, we describe our
co-simulation methodology. Section V gives the results of
our co-simulations. Section VI concludes the paper.
For a fuller listing of works in the NSCS realm, consult
the bibliography and the references contained herein, the
thesis [5] from which this paper is condensed, or consult
the papers and resources provided online in [8].
Fig. 1. Networked sensing and control system. Reproduced from [13].
II. REPRESENTATIVE NETWORKED SENSING AND
CONTROL SYSTEM
In this section, we introduce the networked sensing and
control systems that will be used as examples throughout
the paper. We will describe the architecture and parameters
of the network through which the NSCSs will communicate.
Additionally, we will describe an example nonlinear system.
A. Network
The controller, sensors, and actuators of a networked
sensing and control system are nodes on a computer net-
work. Although there are many different physical and data
link standards for networked control, we choose to focus
on a simple and heterogeneous packet switched network,
with no explicit quality-of-sevice (QoS) provisioning. Fig.
2 illustrates the topology of our sample network with three
plants and a controller. The controller is at node 0, the router
at node 1, and the plants at nodes 2, 3, and 4. Throughout the
simulations, we vary many attributes of the network system,
including: (i) the number of plants on the network, (ii) the
size of the router’s buffer at the T1 link, (iii) the delay of
the T1 link.
Throughout this paper, we assume that the time required
for the controller to calculate a control signal and initiate its
transmission on the network is small enough to be ignored.
In reality, however, some amount of time is required; this
must be taken into consideration when choosing network
parameters such as the number of plants which can be
controlled by one controller.
In general, an NSCS will experience two distinct delays:
a delay from the sensor to the controller (τ
sc
), and a

剩余7页未读,继续阅读
资源评论


yuda_80
- 粉丝: 0
- 资源: 2









最新资源
- ASP.NET《数据库原理及应用技术》课程指导平台的开发(源代码+论文)(20248c).7z
- comsol 拓扑优化,流动传热拓扑优化,流固耦合拓扑优化 标准方程模型,温度,耗散双目标拓扑优化,材料插值模型,归一化
- 汽车基于动力学模型MPC的加入规划层的轨迹跟踪避障控制 双障碍物避障
- 目标检测(航拍)配网缺陷检测数据集1787张3类YOLO+VOC格式.zip
- Comsol隧道围岩流固耦合 1主题:岩溶隧道突水渗流和损伤 2内容:mph文件、力学参数文件,围岩损伤课题参考文献(500M) 3备注:看懂每一步建模过程,特别注意研究模态及matlab和comso
- 目标检测-6种常见宠物狗狗类别识别数据集1257张YOLO+VOC格式(已增强).zip
- 调频电路设计 Multisim.13
- 石英晶体振荡电路设计 Multisim.13
- 毕设-php电子商务网站-毕业设计3.zip
- 毕设-PHP基于Linux的远程管理系统客户端的实现(源代码+lw)6.zip
- 毕设-php进销存管理系统-毕业设计9.zip
- 毕设-php酒店预订管理系统-毕业设计pc10.zip
- 毕设-基于PHP的网上书店的设计(lw)20.zip
- 【未发表】基于海洋捕食者优化算法MPA优化宽度学习BLS实现光伏数据预测算法研究附Matlab代码.rar
- 【未发表】基于海洋捕食者优化算法MPA优化集成学习结合核极限学习机KELM-Adaboost实现风电数据时序预测算法研究附Matlab代码.rar
- 【未发表】基于海洋捕食者优化算法MPA优化集成学习结合鲁棒极限学习机RELM-Adaboost实现负荷数据回归预测算法研究附Matlab代码.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


