基于matlab的abb+irb1600机器人运动学仿真
版权申诉
45 浏览量
2022-06-03
14:01:36
上传
评论 3
收藏 1.84MB PDF 举报

设备管理与维修 2019 翼9
(上)
轴号 工作范围
/毅
最高速度
/
(
毅/s
)
1
#
轴
-180~180 180
2
#
轴
-90~150 180
3
#
轴
-245~65 185
4
#
轴
-200~200 385
5
#
轴
-115~115 400
6
#
轴
-400~400 460
基于MATLAB的ABBIRB1600机器人运动学仿真
摘要:为了验证工业机器人ABBIRB1600的运动学性能,依据其基本结构及参数,利用改进的D-H方法在MATLAB中进行机
器人建模,调用MATLAB机器人工具箱中的fkine函数进行正—
—
—逆运动学仿真,并选择关节空间轨迹规划法对该机器人进行运
动轨迹研究,最后得到了各关节空间的运动位移、角速度和角加速度的曲线,实现了对ABBIRB1600机器人的运动学仿真。
关键词:改进的
D-H
方法;机器人运动学仿真;
MATLAB
中图分类号:
TP242
文献标识码:
B
DOI:
10.16621/j.cnki.issn1001-0599.2019.09.17
0
引言
随着工业技术的发展,单纯的手工劳动早已不能满足现代
社会的基本需求,工业机器人应运而生,大大提高了生产效率,
是智能化社会发展的重要一步。瑞典的
ABB
公司有巨大的影响
力,是目前世界上工
业机器人四大巨头之
一。
在工业机器人依
旧昂贵的市场背景下,
盲目安装可能会导致
人力物力的浪费。随着
计算机智能设备的发
展,计算机虚拟仿真模
拟技术也愈渐成熟。研
究人员通过在计算机
上建立工业机器人的
仿真模型,使其具有与
真实机器人类似的物
理功能。例如
MATLAB
中的
Robotics Toolbox
(机器人工具箱),它包
括了种类众多的功能
函数,可以对工业机器
人进行运动学仿真,这
大大减少了资源浪费。
1 ABB IRB1600
机
器人基本结构
ABB IRB1600
是
ABB
公司旗下的一款
六自由度的串联型机
器人,它具有广泛的
应用,在码垛、测量等
领域都有优越的表现
(图
1
、表
1
)。
2
使用改进
D
—
H
方法的
MATLAB
建模
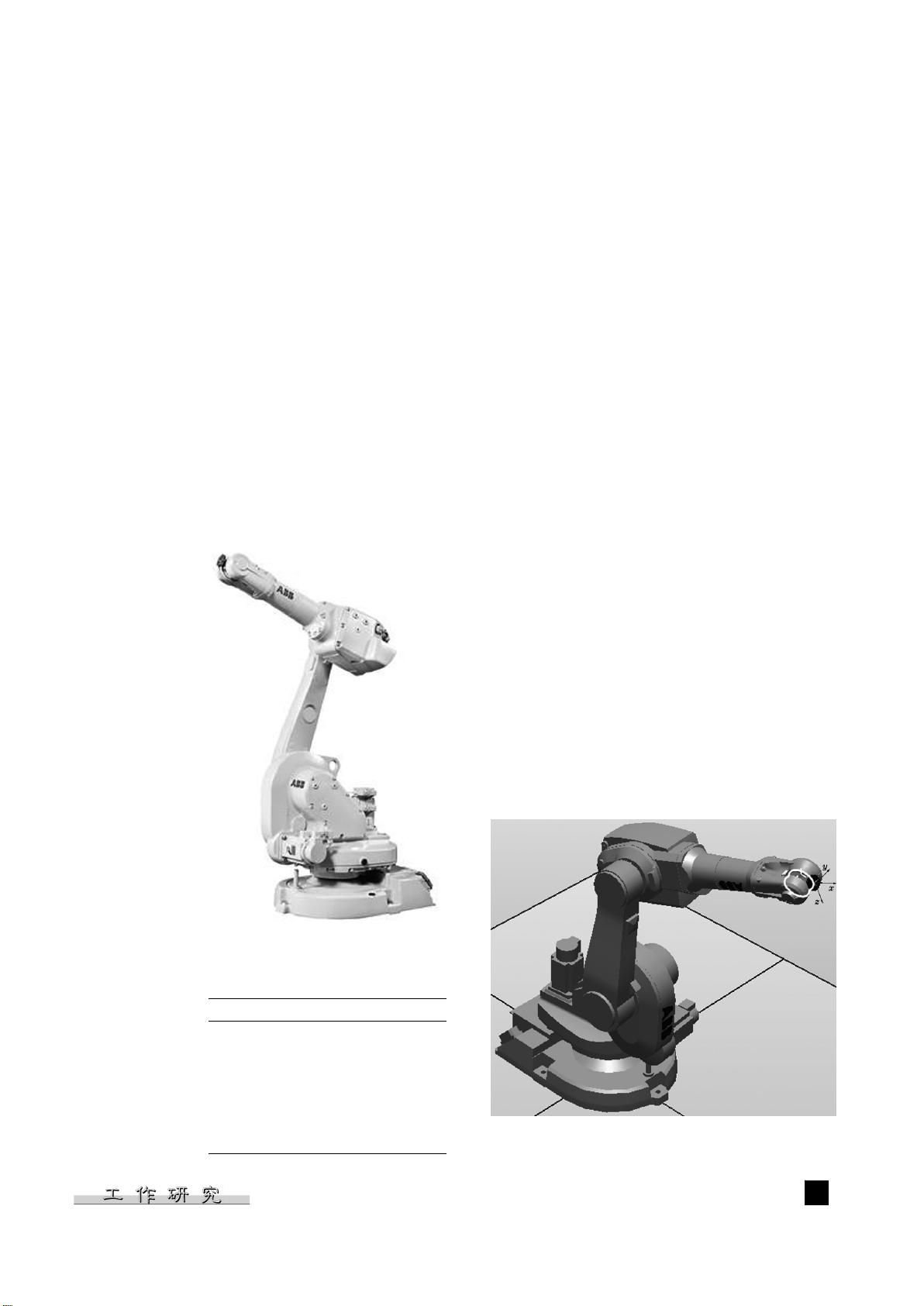
图
2
所示为在
ABB
公司旗下的软件
RobotStudio
中仿真的
ABB IRB1600
机器人。
可以由机器人的改进的
D
—
H
参数,利用机器人工具箱的
Link
函数实现串联机器人的建模。改进的
D
—
H
参数来源于
D
—
H
方法,
D
—
H
方法是由
Denavit
和
Hartenberg
[2]
提出,本质为
关节链中的每一个杆件都构建坐标系的矩阵方法,其采用
4*4
的其次坐标变换矩阵来描述机器人相邻两杆
i
和
i-1
的空间几
何关系,
D
—
H
参数建模是常见的建模方式。本文采用改进的
D
—
H
方法,与
D
—
H
方法不同的是它是在远离底座的结构处建
立坐标系。
ABB IRB1660
机器人的改进的
D
—
H
参数见表
2
。
其中,
兹
i
为连杆转角,即为两条公垂线
a
i-1
和
a
i
间的夹角;
d
i
为连杆距离,即为两条公垂线
a
i-1
和
a
i
间的距离;为连杆长
度,即为
i-1
与
i
两关节轴线间的公垂线长度;
坠
i-1
为连杆扭角,
即为
i-1
与
i
两关节轴线间的公垂线长度。
连杆坐标系的建立标准如下:Z
i-1
轴沿关节
i-1
的轴线方
向,
X
i-1
沿公垂线
a
i-1
且指向
Z
i
轴方向,
Y
i-1
满足右手定则。
图
1 ABB IRB1600
机器人实物
表
1 ABB IRB1600
机器人工作参数
图
2 RobotStudio ABB IRB1600
机器人仿真图
輨輱
资源评论













