计算机控制系统试题及答案.doc
74 浏览量
2022-11-29
12:54:40
上传
评论
收藏 335KB DOC 举报

.
.
. .word..
计算机控制系统试卷一答案
一、简答题〔每题 5 分,共 50 分〕
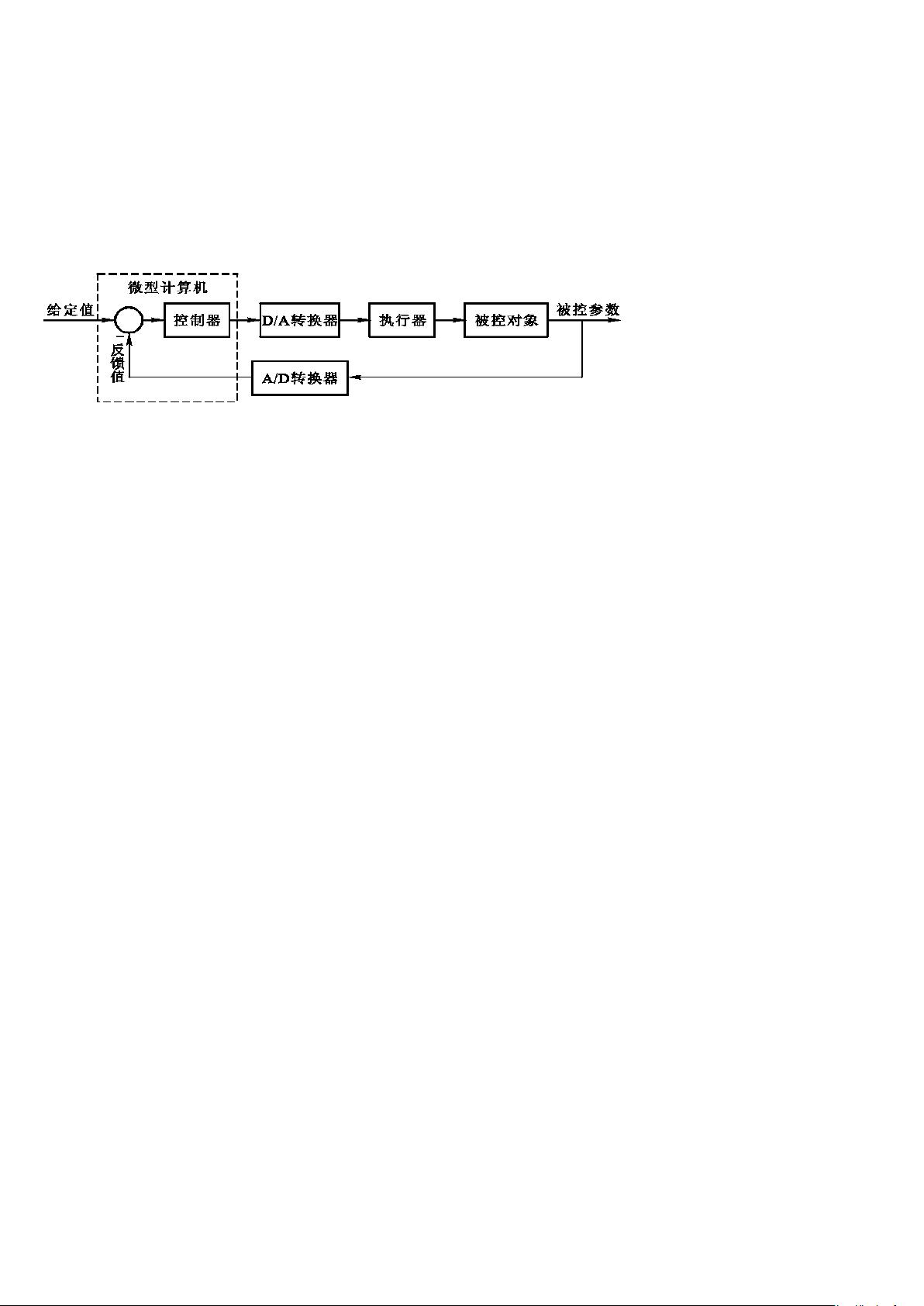
1、 画出典型计算机控制系统的根本框图。答:典型计算机控制系统的根本框图如下:
2、 根据采样过程的特点,可以将采样分为哪几种类型?
答 (1) 周期采样 指相邻两次采样的时间间隔相等,也称为普通采样。
(2) 同步采样如果一个系统中有多个采样开关,它们的采样周期一样且同时进展采样,那么称为同步采样。
(3) 非同步采样如果一个系统中有多个采样开关,它们的采样周期一样但不同时开闭,那么称为非同步采样。
(4) 多速采样如果一个系统中有多个采样开关,每个采样开关都是周期采样的,但它们的采样周期不
一样,那么称多速采样。
(5) 随机采样假设相邻两次采样的时间间隔不相等,那么称为随机采样。
3、 简述比例调节、积分调节和微分调节的作用。
答:(1)比例调节器:比例调节器对偏差是即时反响的,偏差一旦出现,调节器立即产生控制作用,使输
出量朝着减小偏差的方向变化,控制作用的强弱取决于比例系数 K
P
。比例调节器虽然简单快速,但对于
系统响应为有限值的控制对象存在静差。加大比例系数 K
P
可以减小静差,但是 K
P
过大时,会使系统的
动态质量变坏,引起输出量振荡,甚至导致闭环系统不稳定。
(2)积分调节器:为了消除在比例调节中的剩余静差,可在比例调节的根底上参加积分调节。积分调
节具有累积成分,只要偏差 e 不为零,它将通过累积作用影响控制量 u,从而减小偏差,直到偏差为零。
积分时间常数 T
I
大,那么积分作用弱,反之强。增大 T
I
将减慢消除静差的过程,但可减小超调,提高稳
定性。引入积分调节的代价是降低系统的快速性。
(3)微分调节器:为加快控制过程,有必要在偏差出现或变化的瞬间,按偏差变化的趋向进展控制,
使偏差消灭在萌芽状态,这就是微分调节的原理。微分作用的参加将有助于减小超调,克制振荡,使系
统趋于稳定。
4、 线性离散控制系统稳定的充要条件是什么?
答:线性离散控制系统稳定的充要条件是: 闭环系统特征方程的所有根的模|z
i
|<1,即闭环脉冲传递
函数的极点均位于 z 平面的单位圆内。
5、 为什么会出现比例和微分饱和现象?

剩余12页未读,继续阅读
资源评论













