计算机控制系统试题答案.doc
15 浏览量
2022-12-21
12:11:11
上传
评论
收藏 714KB DOC 举报

计算机控制系统试卷一答案
班级: 姓名: 学号: 成绩:
一、简答题(每小题 5 分,共 50 分)
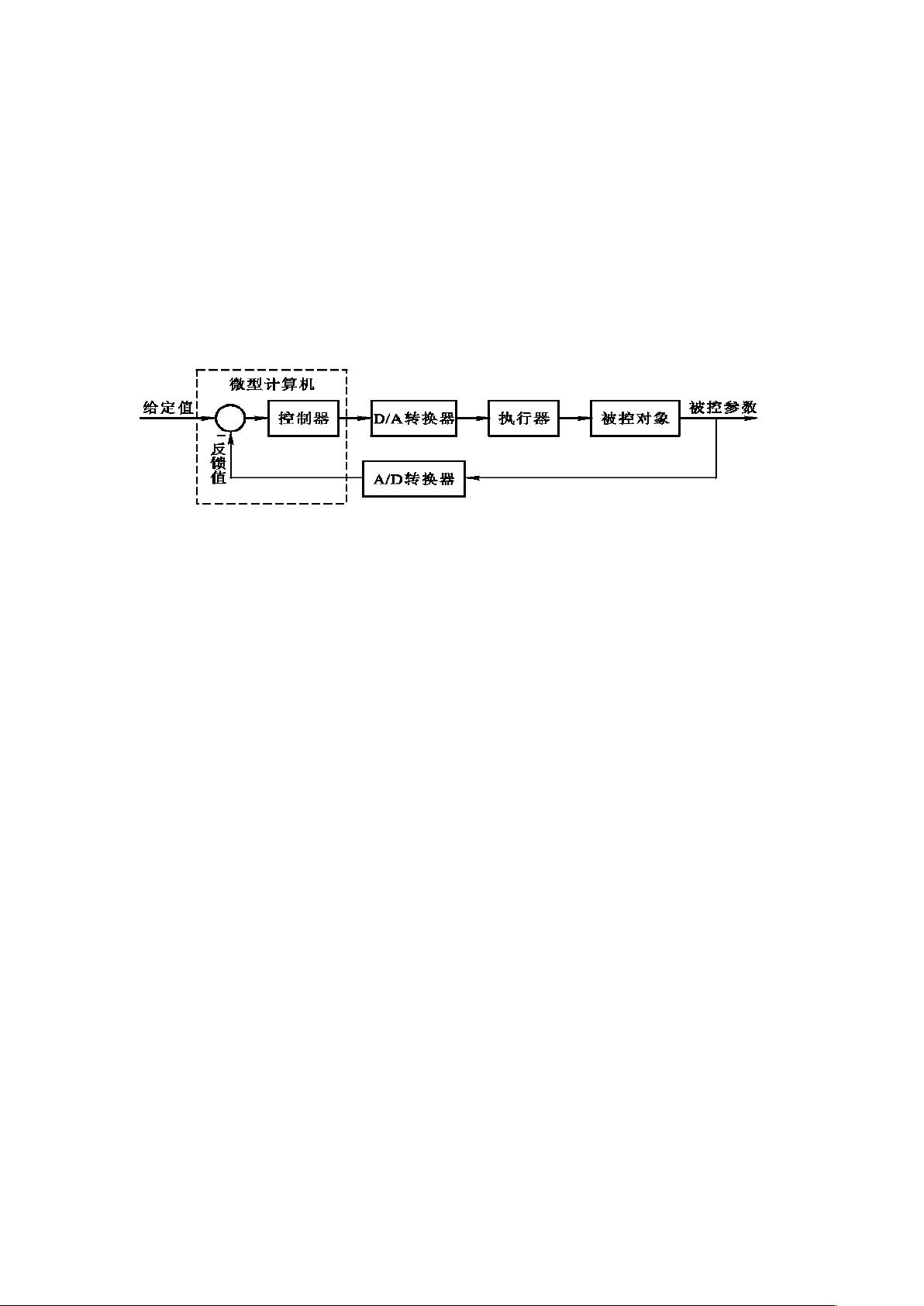
1. 画出典型计算机控制系统的基本框图。
答:典型计算机控制系统的基本框图如下:
2. 根据采样过程的特点,可以将采样分为哪几种类型?
答:根据采样过程的特点,可以将采样分为以下几种类型。
(1) 周期采样
指相邻两次采样的时间间隔相等,也称为普通采样。
(2) 同步采样
如果一个系统中有多个采样开关,它们的采样周期相同且同时进
行采样,则称为同步采样。
(3) 非同步采样
如果一个系统中有多个采样开关,它们的采样周期相同但不同时
开闭,则称为非同步采样。
(4) 多速采样
如果一个系统中有多个采样开关,每个采样开关都是周期采样的,
但它们的采样周期不相同,则称多速采样。
(5) 随机采样
若相邻两次采样的时间间隔不相等,则称为随机采样。
3. 简述比例调节、积分调节和微分调节的作用。
答:(1)比例调节器:比例调节器对偏差是即时反应的,偏差一
旦出现,调节器立即产生控制作用,使输出量朝着减小偏差的方向变
化,控制作用的强弱取决于比例系数
K
P
。比例调节器虽然简单快速,
但对于系统响应为有限值的控制对象存在静差。加大比例系数
K
P
可
以减小静差,但是
K
P
过大时,会使系统的动态质量变坏,引起输出


剩余30页未读,继续阅读
资源评论













