实验一 建立一级倒立摆的数学模型
一、 实验目的
学习建立一级倒立摆系统的数学模型,并进行 仿真。
二、 实验内容
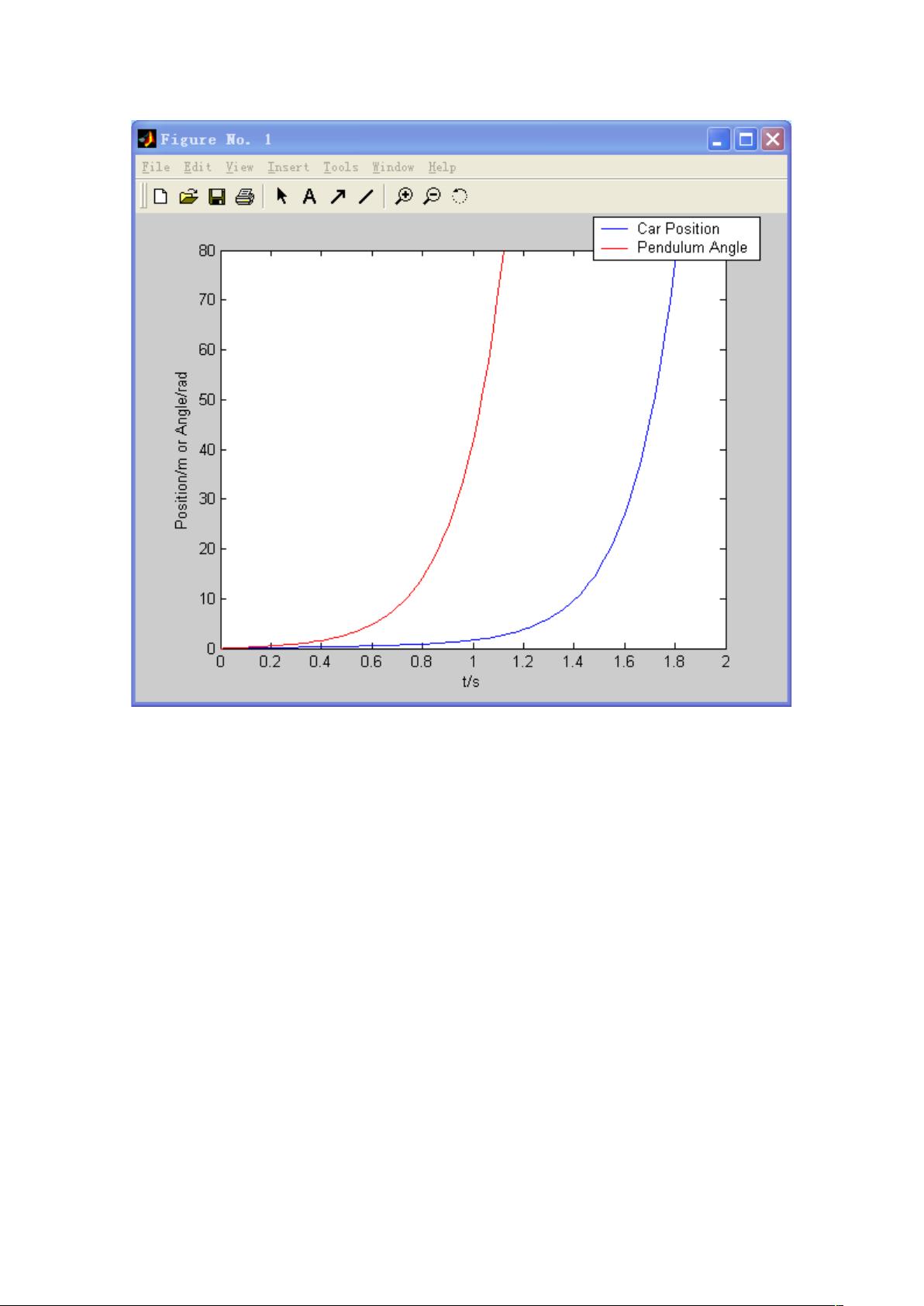
写出系统传递函数和状态空间方程,用 进行仿真。
三、 Matlab 源程序及程序运行的结果
(1) Matlab 源程序见附页
(2) 给出系统的传递函数和状态方程
(a)传递函数 gs 为摆杆的角度:
(b)传递函数 gspo 为小车的位移传递函数:
(c)状态矩阵 A,B,C,D:
!
"
####
#
#
#
#
"
#
#
#
#
"
####
!
!
$"