
用 MC 备份恢复机器人零点
1 首先要有 MC 备份。
插上储存卡,按 MENUS 键,选择 5 File,按 F5 选择选择储存设备 1 Set Device,选择 Mem
Card(储存卡)。再按 F4 Backup,选择 7 All Above。完成备份。F5 中的 3 Make DIR 为创
建文件夹,即在你选择的储存设备里面创建文件夹。
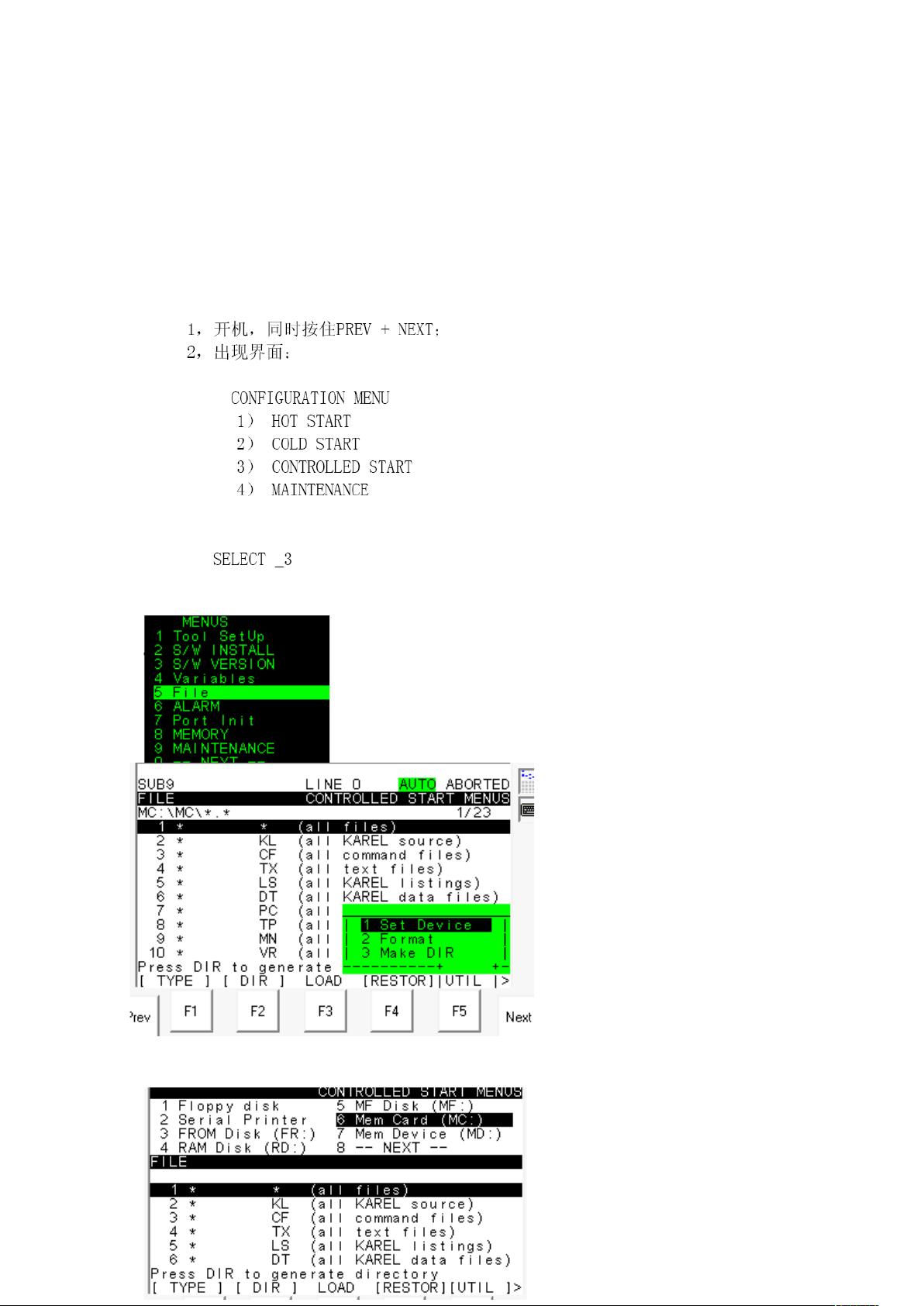
2 对机器人进行 controlled start 的启动方式:
选 择 3。
3 恢 复 SYSMAST.SV 文件。
按 MENU 键,选择 5File。
选择储存设备 Set Device,选择 Mem
Card(储存卡)。

yang659
- 粉丝: 0
- 资源: 4












评论0