基于OpenGL的工业机器人三维仿真设计与实现.docx
版权申诉
145 浏览量
2022-11-05
12:14:37
上传
评论
收藏 446KB DOCX 举报

基于 OpenGL 的工业机器人三维仿真设计与实现
摘要:研究了 OpenGL 在工业机器人仿真中的应用及其实现方法,利用OpenGL 卓越的渲染功能对场景和机器人进行绘
制,形成真实感比较强的三雄仿真环境,介绍了自行开发的机器人离线壕程程序RobotM,RobotM 具有机器人模型的创
建、动画仿真、自动路径产生等功能,实现了机器人离线鳊程与仿真系统。
关键词:机器人;三雄仿真;OpenGL;离线壕程
1 引言
随着机器人技术的运用与发展,机器人编程技术成为一个很重要的问题。机器人离线编程(OIP,OffLineProgram)
具有不需要停止机器人工作和可以通过图形仿真来避免实际机器人运动中的碰撞等优点。目前国内基本没有针对机器人
仿真的成型工具,国外有一些商品软件如 RoboCAD,ROTSY,Evision 等系统,但是 RoboCAD 价格比较昂贵,不能够
普遍推广;ROTSY 是基于 Motoman 机器人的一套仿真系统,但是他的普遍性不强而且价格也比较高。本文以江苏省“十
五”攻关项目网络化焊接机器人研制课题为背景,设计了基于OpenGL 的工业机器人三维仿真机离线软件 RobotM,完成
了对于 Couma 机器人的离线仿真程序开发。
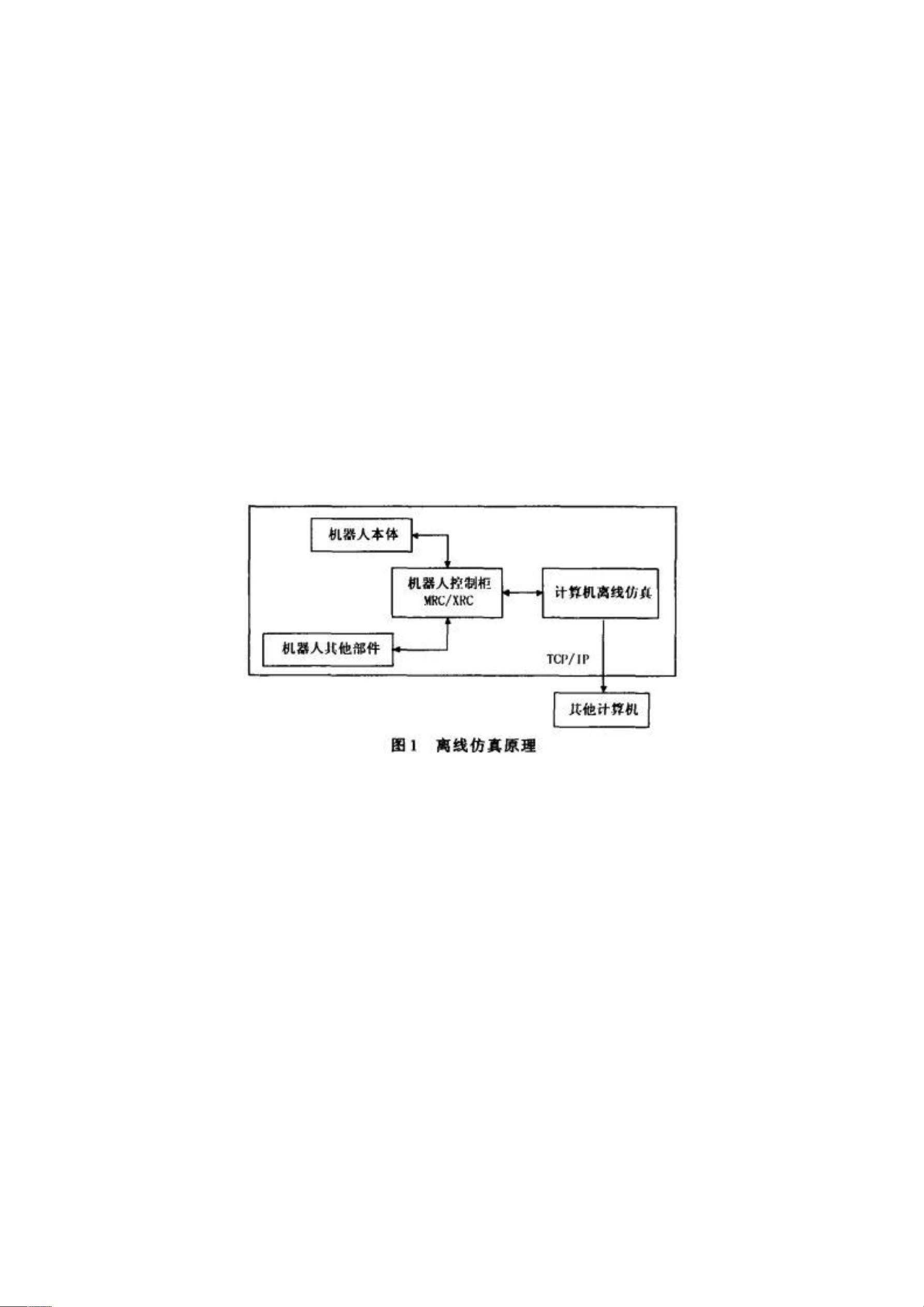
OpenGI 是与图形硬件无关的程序设计接口,而且 OpenGI 的类库完成三维图形的底层操作,同时又具有建模方便、
实时三维仿真、真实感强、平台独立性、真实性强、对于系统的要求并不是很高等优点。所以RobotM 利用 OpenGL 和
微软的 VC+开发工具以及 MFC 类库作为底层的图形库接口实现仿真设计。离线仿真原理如图1 所示。
2 系统结构详述
系统模块图如图 2 所示。
资源评论


xxpr_ybgg
- 粉丝: 6441
- 资源: 3万+









最新资源
- 农村信用社联合社计算机信息系统投产与变更管理办.docx
- 农村信用社联合社计算机信息系统数据管理办法.docx
- 利用SPSS作临床效度分析线上计算网站介绍-医学研究部统计谘.(医学PPT课件).ppt
- 利用Zabbix监控mysqldump定时备份数据库状态.docx
- 利用计算机解决问题的基本过程.doc
- 化工铁路通信工程总结.doc
- 北京大学网络教育软件工程作业.docx
- 医药公司(连锁店)计算机操作规程未新系统的自行按照旧制修改-新系统过制的编号加修模版.doc
- 医药公司(连锁店)计算机系统操作规程模版.doc
- 医药连锁门店计算机系统的操作和管理程序未新系统的自行按照旧制修改-新系统过制的编号加修模版.docx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


