外文翻译--具有2或3个自由度的对应机械手.pdf
版权申诉
109 浏览量
2022-07-12
02:20:04
上传
评论
收藏 1.51MB PDF 举报


Parallel Mechanisms with Two or Three Degrees of
Freedom
Christiaan J.J. Paredis, H. Benjamin Brown, Pradeep K. Khosla
Abstract
: Parallel manipulators for the machine tool Industry have been studied
extensively for various industrial applications. However, limited useful workspace areas, the poor
mobility, and design difficulties of more complex parallel manipulators have led to mare interest
in parallel manipulators with less than six degrees of freedom (DoFs). Several parallel
mechanisms with various numbers and types of degrees of freedom are described in this paper,
which can be used in parallel kinematics machines, motion simulators, and industrial robots.
Key words
: parallel manipulator; parallel kinematic machine; degree of freedom; robot
Introduction
Mechanical systems that allow a rigid body to move with respect to a fixed base
play a very important role in numerous applications. A rigid body can move in various
translational or rotational directions which are called degrees of freedom (DoFs). The
total number of degrees of freedom for a rigid body cannot exceed six, for example,
three axes, A robot includes a system to control several degrees of freedom of an
end – effector.
The last few years have witnessed important developments in the use of industrial
robots, mainly due to their flexibility. However, the mechanical architecture of the
most common robots is not well adapted to certain tasks. Other types of architectures
have, therefore, recently been developed for industrial use, including parallel
manipulators.
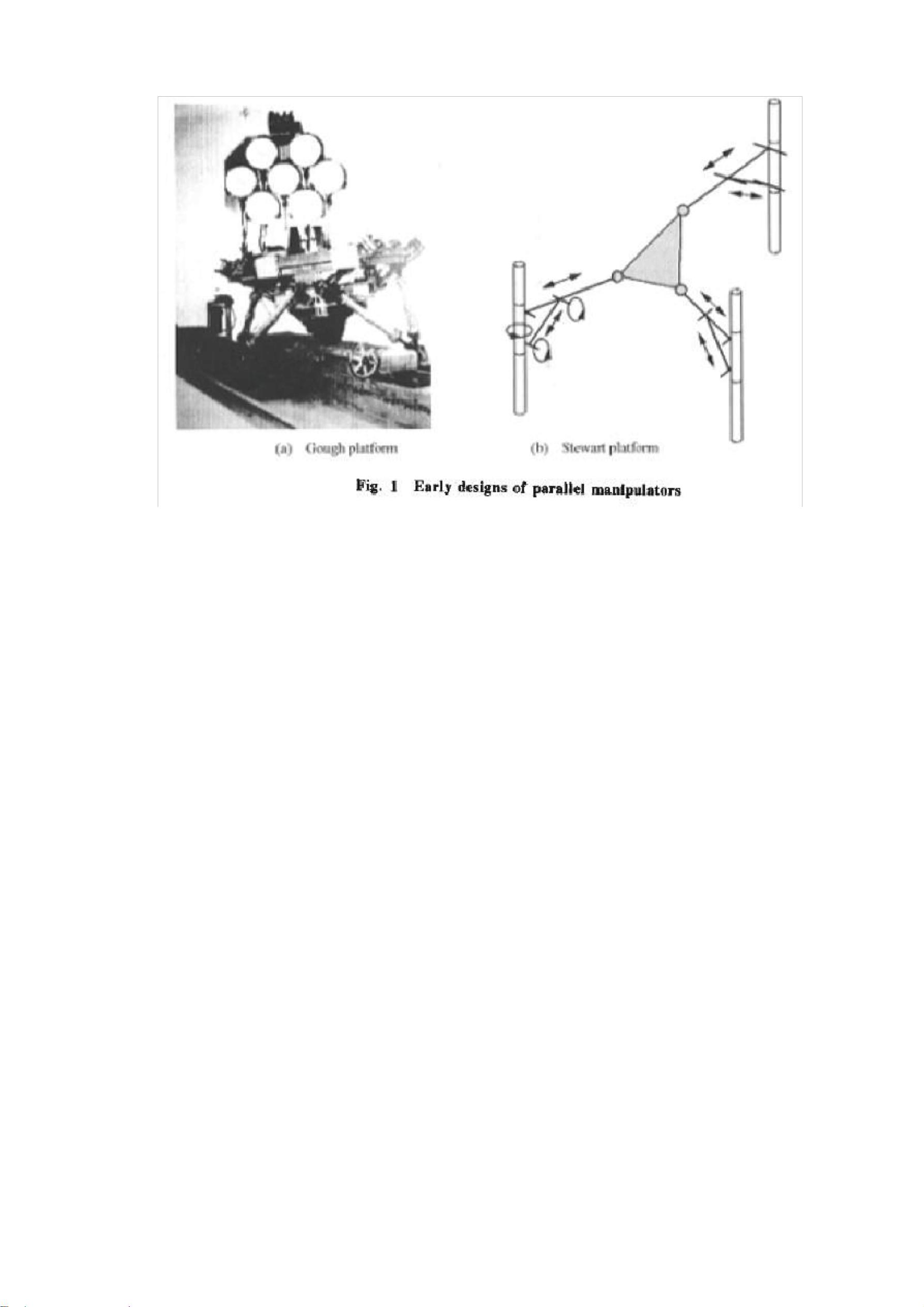
A parallel manipulator, which is a closed-loop mechanism, typically consists of a
moving platform that is connected to a fixed base by several limbs or legs. Typically,
the number of limbs is equal to the number of degrees of freedom such that every
limb is controlled by one actuator and all the actuators can be mounted at or near the


剩余23页未读,继续阅读
资源评论













