
Apollo公开课丨Apollo运动轨迹规划技术
本节主要和大家分享一下Apollo运动轨迹规划方面的一些新进展。运动轨迹规划或者优化属于无
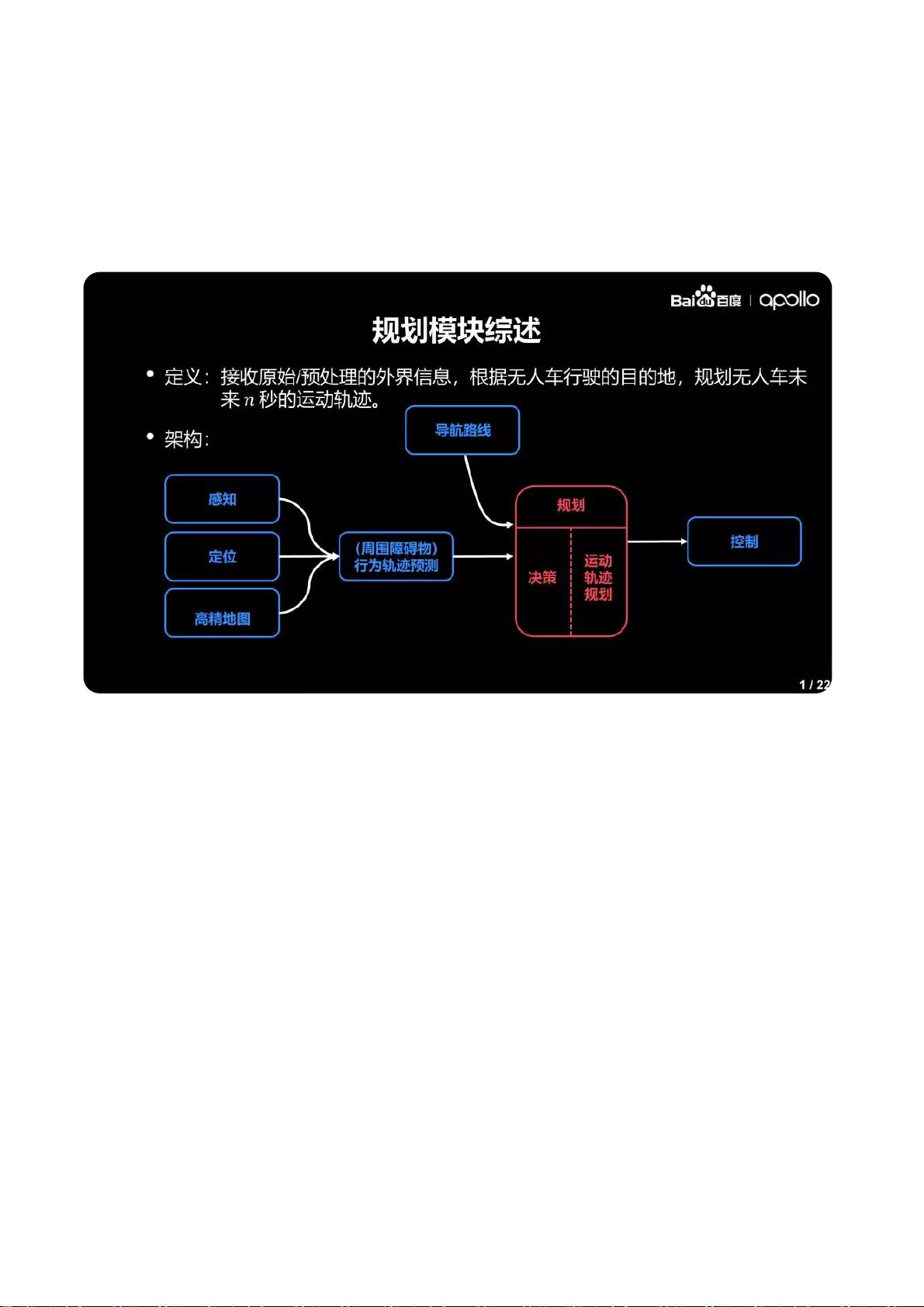
人车规划模块。规划模块的定义是接收原始/预处理的外界信息,根据无人车行驶的目的地,规划
无人车未来n秒的运动轨迹。
▲规划模块综述
可以看到规划模块的输入包括原始感知、定位、高精地图、导航、路线等信息,也有一些预处理过
对于周围障碍物的运动行为轨迹预测的信息,它输出给车辆控制模块,执行左/右转、刹车、油门
等操作。规划模块的特点难点是接收离散的信息输入,输出必须是能用数学语言表达的连续运动
轨迹。正 因为此特 点,规划 模块分为 两部分, 一部分是 决策模块 ,另外一 部分运动 轨迹规划 模
块。决策模块对接上游比较发散的各种信息输入,运动轨迹规划模块输出非常具体的轨迹点。
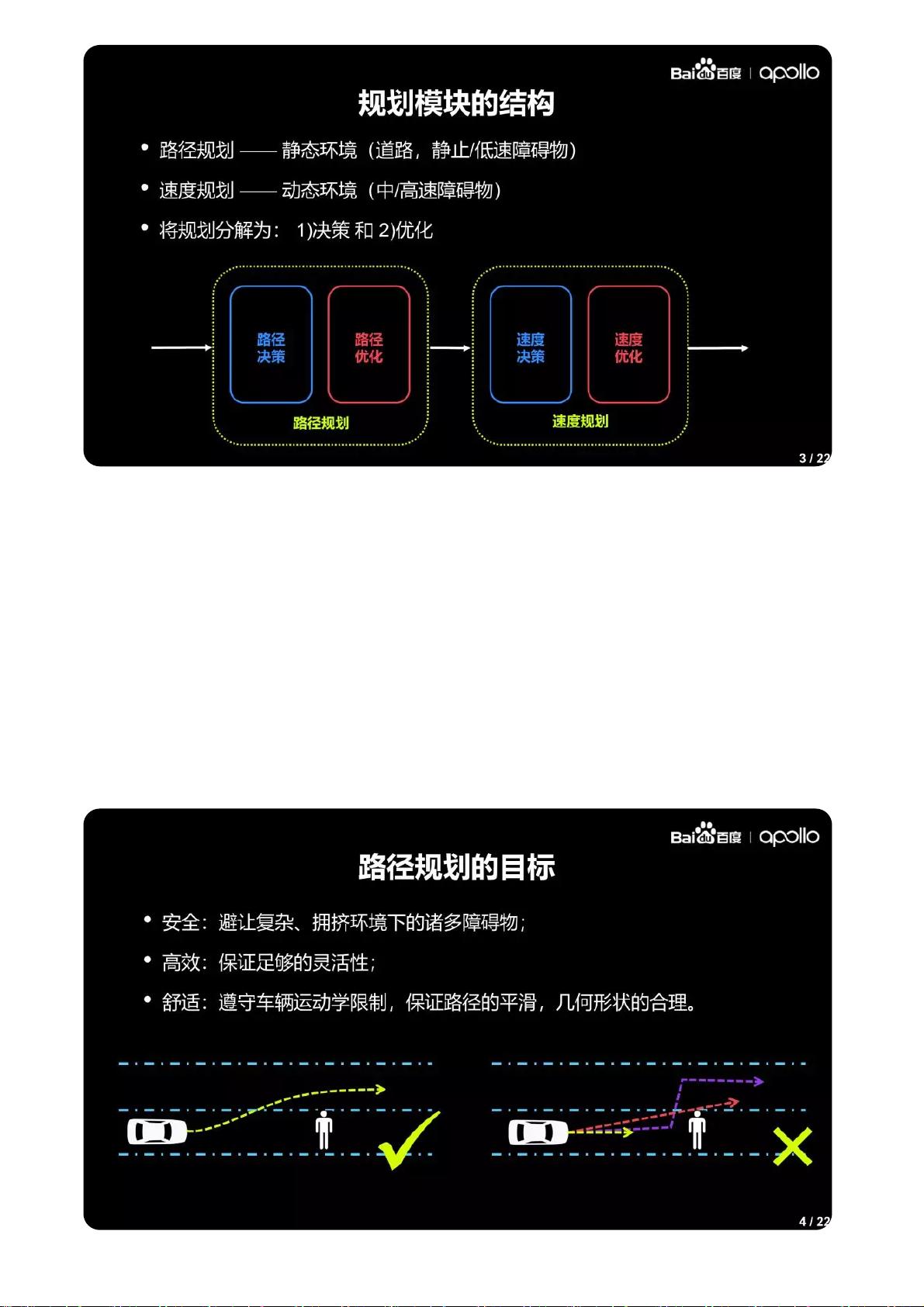
规划模块的目标大体有三类,一是安全,要避免所有的碰撞和任何可能的险情;二是高效,在合理
的时间内抵达终点/目的地;三是舒 适,避免急转/急刹等影响体感的行为,保证良好的乘坐体验。
剩余6页未读,继续阅读

疯狂的机器人
- 粉丝: 9159
- 资源: 152









最新资源
- NSArgumentNullException如何解决.md
- VueError解决办法.md
- buvid、did参数生成算法
- tiny-cuda-cnn.zip
- 关于月度总结的PPT模板
- 手表品牌与型号数据集,手表型号数据
- 基于Java实现(IDEA)的贪吃蛇游戏-源码+jar文件+项目报告
- 数字按键3.2考试代码
- 颜色拾取器 for Windows
- 台球检测40-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- # 基于MATLAB的导航科学计算库
- Qt源码ModbusTCP 主机客户端通信程序 基于QT5 QWidget, 实现ModbusTCP 主机客户端通信,支持以下功能: 1、支持断线重连 2、通过INI文件配置自定义服务器I
- tesseract ocr 训练相关的环境部署包,包括jdk-8u331-windows-x64.exe、jTessBoxEditorFX-2.6.0.zip 等
- 好用的Linux终端管理工具,支持自定义多行脚本命令,密码保存、断链续接,SFTP等功能
- 大学毕业设计写作与答辩指南:选题、研究方法及PPT制作
- 小偏差线性化模型,航空发动机线性化,非线性系统线性化,求解线性系统具体参数,最小二乘拟合 MATLAB Simulink 航空发动机,非线性,线性,非线性系统,线性系统,最小二乘,拟合,小偏差,系统辨
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0