元胞自动机(Cellular Automata),简称 CA,也有人译为细胞自动机、点格自动
机、分子自动机或单元自动机)。是一时间和空间都离散的动力系统。散布在规
则格网 (Lattice Grid)中的每一元胞(Cell)取有限的离散状态,遵循同样的作用
规则,依据确定的局部规则作同步更新。大量元胞通过简单的相互作用而构成动
态系统的 演化。不同于一般的动力学模型,元胞自动机不是由严格定义的物理
方程或函数确定,而是用一系列模型构造的规则构成。凡是满足这些规则的模型
都可以算作是元 胞自动机模型。因此,元胞自动机是一类模型的总称,或者说
是一个方法框架。其特点是时间、空间、状态都离散,每个变量只取有限多个状
态,且其状态改变的规 则在时间和空间上都是局部的。
元胞自动机的构建没有固定的数学公式,构成方式繁杂,变种很多,行为复杂。
故其分类难度也较大,自元胞自动机产生以来,对于元胞自动机分类的研究就是
元胞 自动机的一个重要的研究课题和核心理论,在基于不同的出发点,元胞自
动机可有多种分类,其中,最具影响力的当属 S. Wolfram 在 80 年代初做的基于
动力学行为的元胞自动机分类,而基于维数的元胞自动机分类也是最简单和最常
用的划分。除此之外,在 1990 年, Howard A.Gutowitz 提出了基于元胞自动机
行为的马尔科夫概率量测的层次化、参量化的分类体系(Gutowitz, H. A. ,1990)。
下面就上述的前两种分类作进一步的介绍。同时就几种特殊类型的元胞自动机进
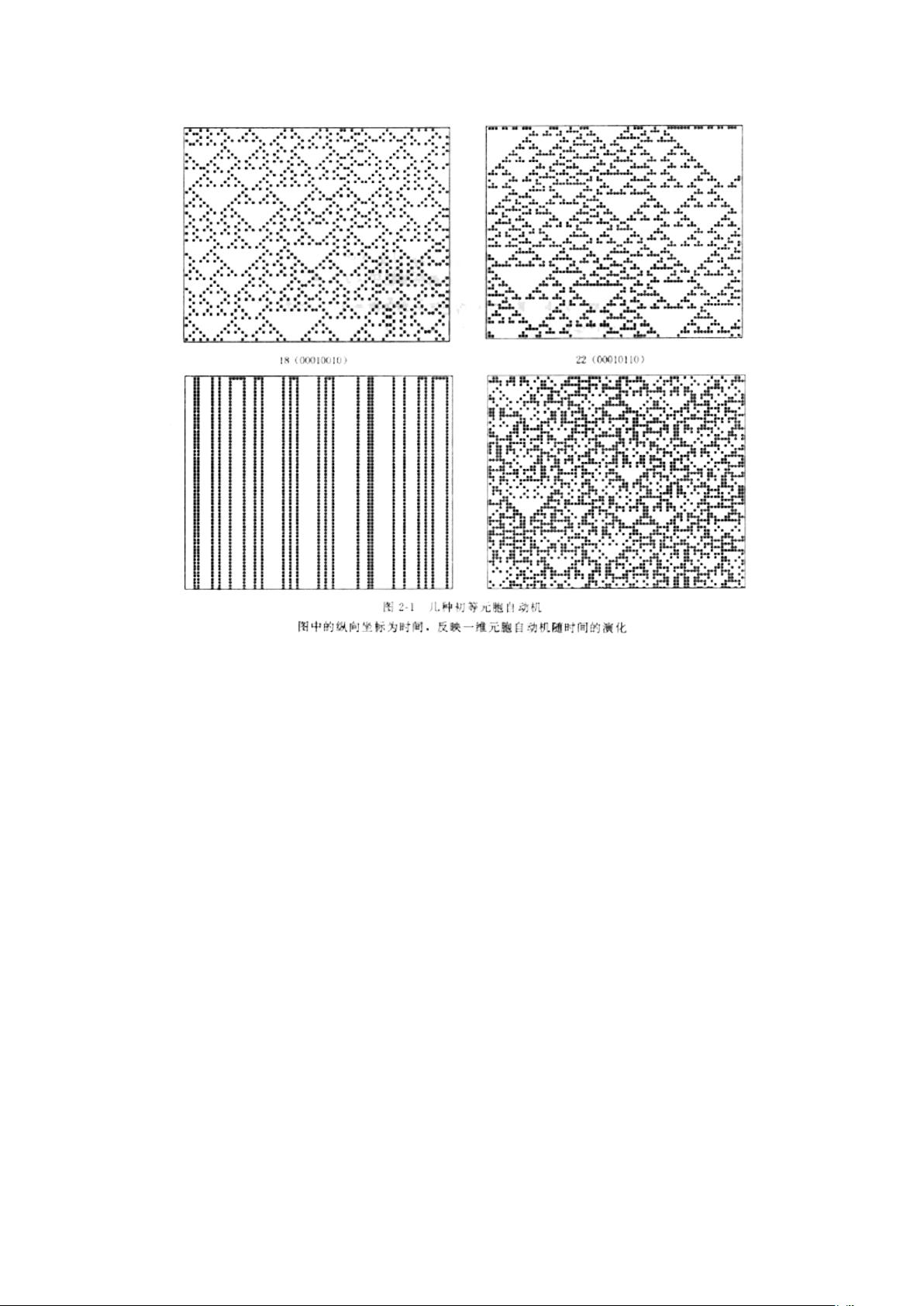
行介绍和探讨 S. Wolfrarm 在详细分忻研究了一维元胞自动机的演化行为,并在
大量的计算机实验的基础上,将所有元胞自动机的动力学行为归纳为四大类
(Wolfram. S.,1986):
(1)平稳型:自任何初始状态开始,经过一定时间运行后,元胞空间趋于一个空间
平稳的构形,这里空间平稳即指每一个元胞处于固定状态。不随时间变化而变化。
(2)周期型:经过一定时间运行后,元胞空间趋于一系列简单的固定结构(Stable
Paterns)或周期结构(Perlodical Patterns)。由于这些结构可看作是一种滤波
器(Filter),故可应用到图像处理的研究中。
(3)混沌型:自任何初始状态开始,经过一定时间运行后,元胞自动机表现出混沌
的非周期行为,所生成的结构的统汁特征不再变止,通常表现为分形分维特征。
(4)复杂型:出现复杂的局部结构,或者说是局部的混沌,其中有些会不断地传播。
从另一角度,元胞自动机可视为动力系统,因而可将初试点、轨道、不动点、
周期轨和终极轨等一系列概念用到元胞自动机的研究中,上述分类,又可以分别
描述为(谭跃进,1996;谢惠民,1994;李才伟、1997);
(1)均匀状态,即点态吸引子,或称不动点;
(2)简单的周期结构,即周期性吸引子,或称周期轨;
(3)混沌的非周期性模式,即混沌吸引子;
(4)这第四类行为可以与生命系统等复杂系统中的自组织现象相比拟,但在连续
系统中没有相对应的模式。但从研究元胞自动机的角度讲,最具研究价值的具有
第 四类行为的元胞自动机,因 为 这 类 元 胞 自 动 机 被 认 为 具 有 " 突 现 计 算
"(Emergent Computation)功能,研究表明,可以用作广义计算机(Universal
Computer)以仿真任意复杂的计算过程。另外,此类元胞自动机在发展过程中还
表现出很强的不可逆(lrreversibility)特征,而且,这 种元胞自动机在若干有
限循环后,有可能会 "死"掉,即所有元胞的状态变为零。
在元胞自动机是由空间上各项同性的一系列元胞所组成,是在有限元胞自动机基
础上发 展起来的,用于模拟和分析几何空间内的各种现象。