首先引见下感知系统。感知可以被看作是对四周世界建模的过程,比如车
辆外行驶过程中,需要晓得其他物体的地理位置、速度、运动方向、加速
度等各种各样的信息,自动驾驶系统接收这些信息之后,再通过后续的规
划和把握模块来对车的运动做真正的调整。
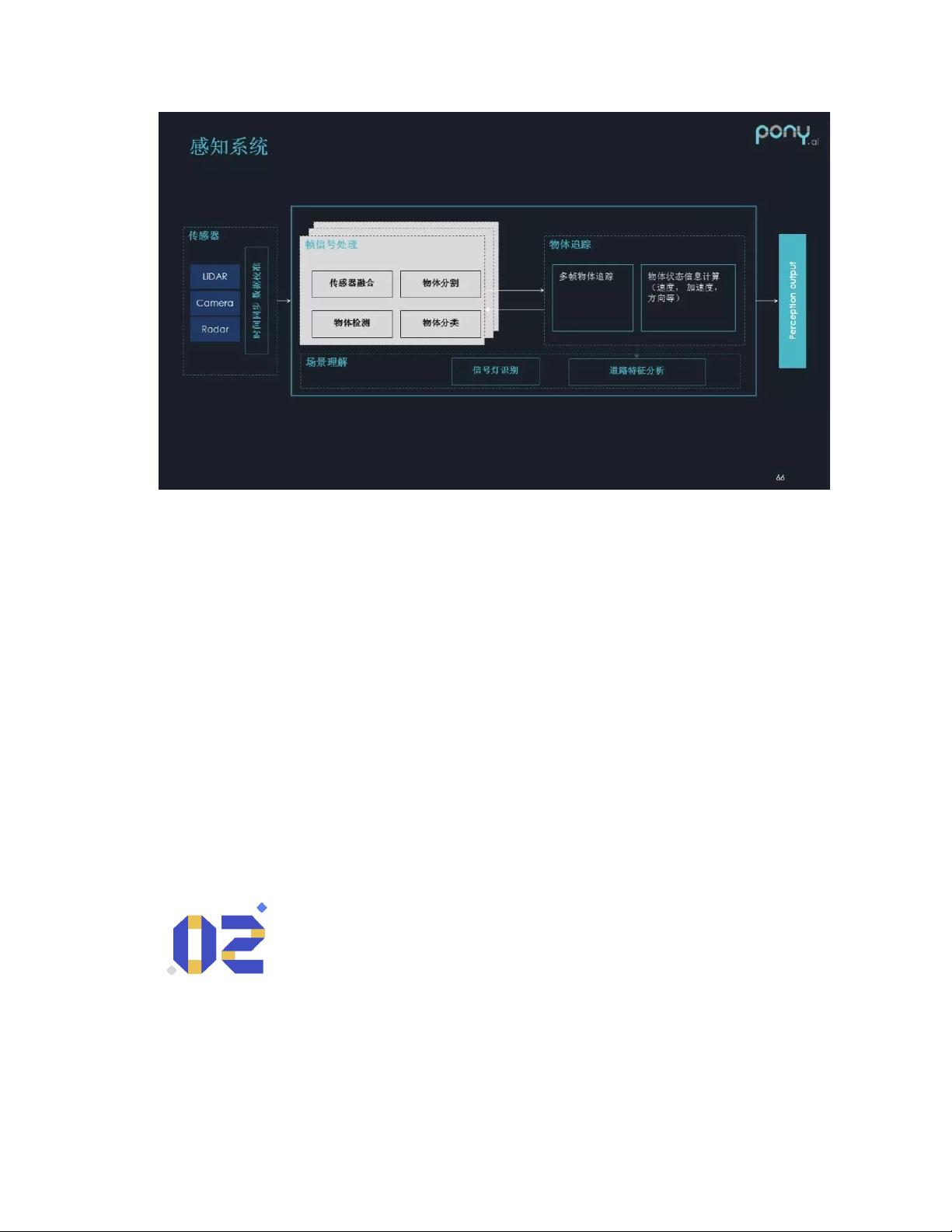
感知可以类比为人类眼睛的功能,即观看四周世界的力量:
◆接受的传感器:激光雷达、照相机、毫米波雷达等。
◆帧信号处理:多传感器深度融合、物体分割、物体检测、物体分类。
◆物体追踪:当有多帧信息之后,可以推算速度、加速度、方向等更有意
义的信息,甚至可以用多帧的信息调整物体分割的结果。
◆道 路 特征 分 析 : 对道路 特征进 行 理解 , 比如交 通信号 灯 、交 通 指示牌
等。
感知可以认为是自动驾驶系统的基础部分,假如感知不到这个世界,就谈
不上对这个世界做出反应,更谈不上后续的路径规划和车辆把握的过程。
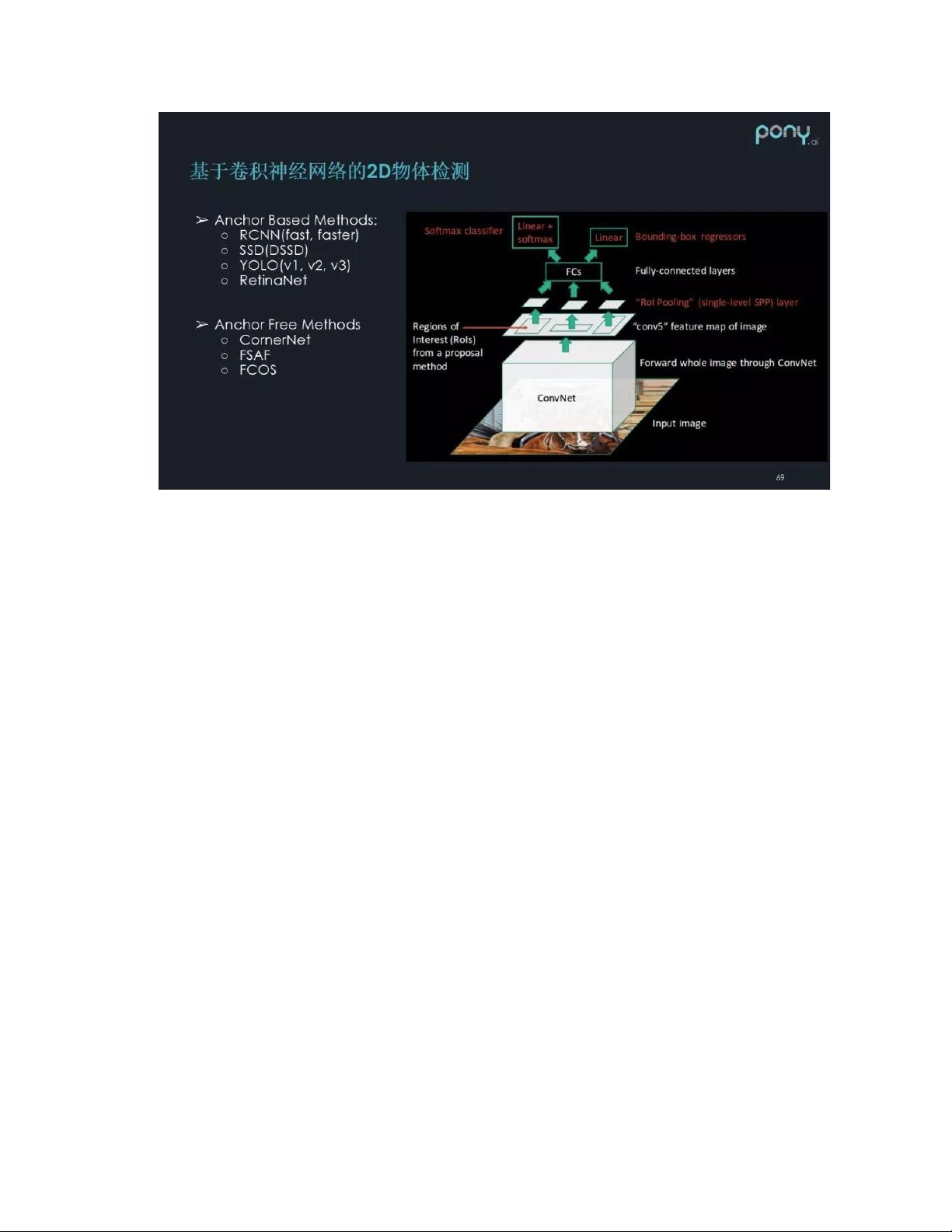
2D 物体检测