
Point Set Registration: Coherent Point Drift
Andriy Myronenko and Xubo Song
Abstract—Point set registration is a key component in many computer vision tasks. The goal of point set registration is to assign
correspondences between two sets of points and to recover the transformation that maps one point set to the other. Multiple factors,
including an unknown nonrigid spatial transformation, large dimensionality of point set, noise, and outliers, make the point set
registration a challenging problem. We introduce a probabilistic method, called the Coherent Point Drift (CPD) algorithm, for both rigid
and nonrigid point set registration. We consider the alignment of two point sets as a probability density estimation problem. We fit the
Gaussian mixture model (GMM) centroids (representing the first point set) to the data (the second point set) by maximizing the
likelihood. We force the GMM centroids to move coherently as a group to preserve the topological structure of the point sets. In the
rigid case, we impose the coherence constraint by reparameterization of GMM centroid locations with rigid parameters and derive a
closed form solution of the maximization step of the EM algorithm in arbitrary dimensions. In the nonrigid case, we impose the
coherence constraint by regularizing the displacement field and using the variational calculus to derive the optimal transformation. We
also introduce a fast algorithm that reduces the method computation complexity to linear. We test the CPD algorithm for both rigid and
nonrigid transformations in the presence of noise, outliers, and missing points, where CPD shows accurate results and outperforms
current state-of-the-art methods.
Index Terms—Registration, correspondence, matching, alignment, rigid, nonrigid, point sets, Coherent Point Drift (CPD), Gaussian
mixture model (GMM), coherence, regularization, EM algorithm.
Ç
1INTRODUCTION
R
EGISTRATION of point sets is a key component in many
computer vision tasks, including stereo matching,
content-based image retrieval, image registration, and
shape recognition. The goal of point set registration is to
assign correspondences between two sets of points and/or
to recover the transformation that maps one point set to the
other. For example, in stereo matching, in order to recover
depth and infer structure from a pair of stereo images, it is
necessary to first define a set of points in each image and
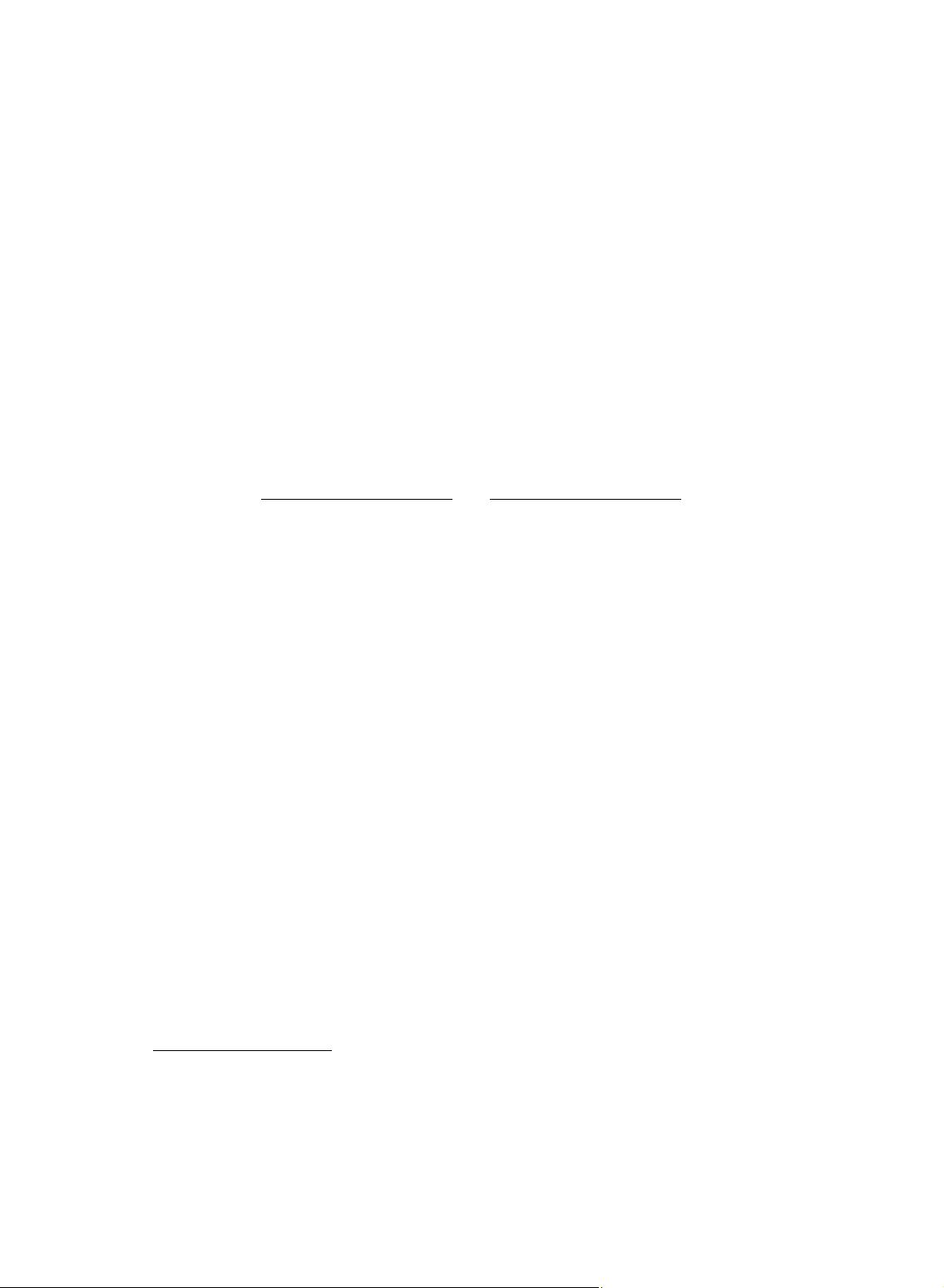
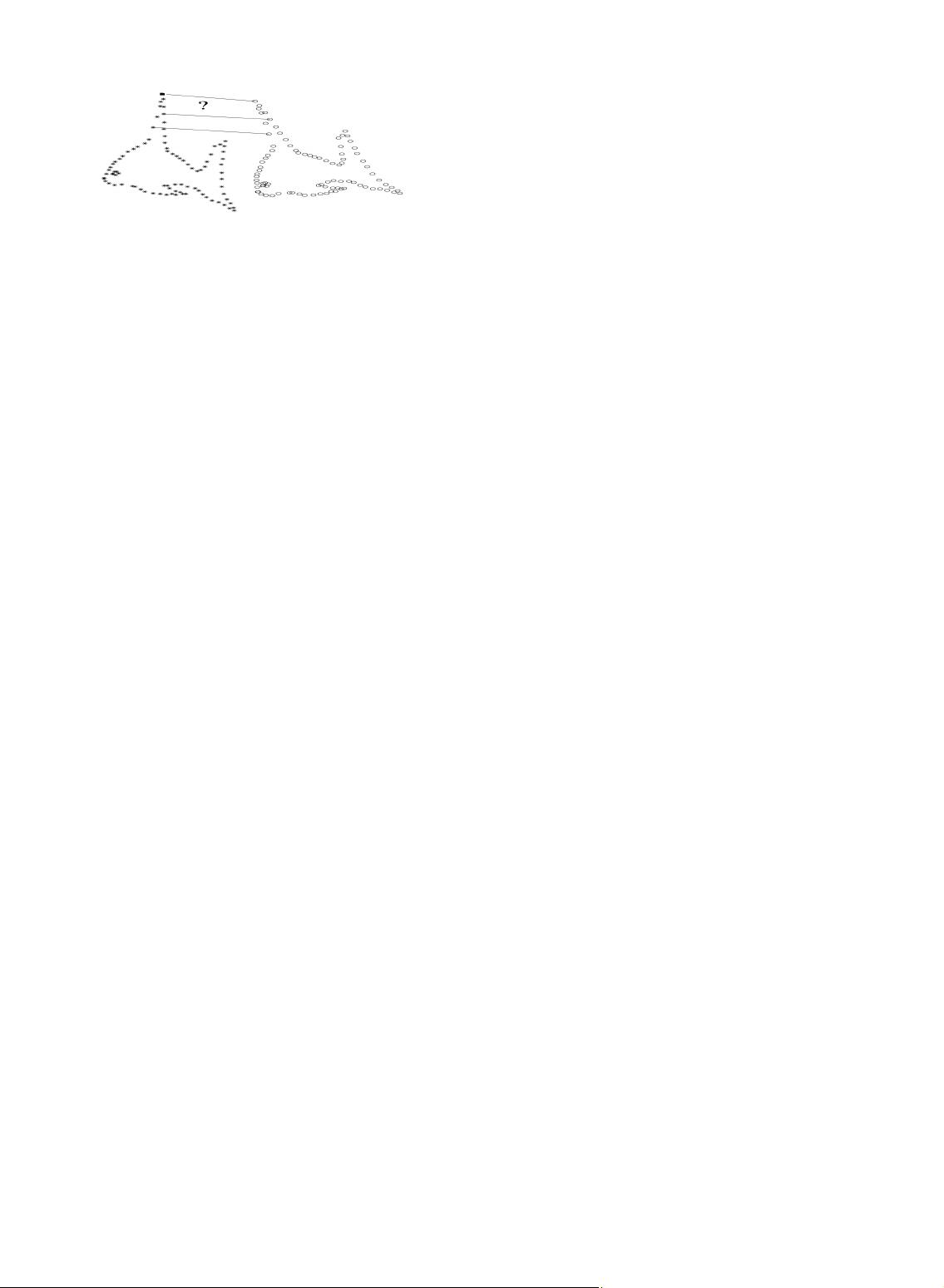
find the correspondence between them. An example of a
point set registration problem is shown in Fig. 1. The
“points” in a point set are often features extracted from an
image, such as the locations of corners, boundary points, or
salient regions. The points can represent both geometric and
intensity characteristics of an image.
Practical point set registration algorithms should have
several desirable properties: 1) the ability to accurately
model the transformation required to align the point sets
with tractable computational complexity, 2) the ability to
handle possibly high dimensionality of the point sets, and
3) robustness to degradations such as noise, outliers, and
missing points that occur due to imperfect image acquisition
and feature extraction.
The transformation usually falls into two categories:
rigid or nonrigid. A rigid transformation only allows for
translation, rotation, and scaling. The simplest nonrigid
transformation is affine, which also allows anisotropic
scaling and skews. Nonrigid transformation occurs in many
real-world problems, including deformable motion track-
ing, shape recognition, and medical image registration. The
true underlying nonrigid transformation model is often
unknown and challenging to model. Simplistic approxima-
tions of the true nonrigid transformation, including piece-
wise affine and polynomial models, are often inadequate for
correct alignment and can produce erroneous correspon-
dences. Due to the usually large number of transformation
parameters, the nonrigid point set registration methods tend
to be sensitive to noise and outliers and are likely to converge
into local minima. They also tend to have a high computa-
tional complexity. A practical nonrigid point set registration
method should be able to accurately model the nonrigid
transformation with tractable computational complexity.
Multidimensional point sets are common in many real-
world problems. Most current rigid and nonrigid point set
registration algorithms are well suited for 2D and 3D cases,
but their generalizations to higher dimensions are not
always trivial. Furthermore, degradations such as noise,
outliers, and missing points significantly complicate the
problem. Outliers are the points that are incorrectly
extracted from the image; outliers have no correspondences
in the other point set. Missing points are the features that
are not found in the image due to occlusion or inaccurate
feature extraction. A point set registration method should
be robust to these degradations.
We present a robust probabilistic multidimensional point
set registration algorithm for both rigid and nonrigid trans-
forms. We consider the alignment of two point sets as a
probability density estimation problem, where one point set
represents the Gaussian Mixture Model (GMM) centroids
and the other one represents the data points. We fit the GMM
2262 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 32, NO. 12, DECEMBER 2010
. The authors are with the Department of Science and Engineering, School of
Medicine, Oregon Health and Science University, 20000 NW Walker
Road, Beaverton, OR 97006.
E-mail: myron@csee.ogi.edu, xubosong@bme.ogi.edu.
Manuscript received 16 Apr. 2009; revised 5 Nov. 2009; accepted 10 Nov.
2009; published online 25 Feb. 2010.
Recommended for acceptance by F. Kahl.
For information on obtaining reprints of this article, please send e-mail to:
tpami@computer.org, and reference IEEECS Log Number
TPAMI-2009-04-0240.
Digital Object Identifier no. 10.1109/TPAMI.2010.46.
0162-8828/10/$26.00 ß 2010 IEEE Published by the IEEE Computer Society

剩余13页未读,继续阅读
资源评论

 y1234ou2016-10-26里面只是论文
y1234ou2016-10-26里面只是论文












