
武汉理工大学《自动控制原理》课程设计说明书
程设计任务书
学生姓名: 专业班级:
指导教师: 工作单位:
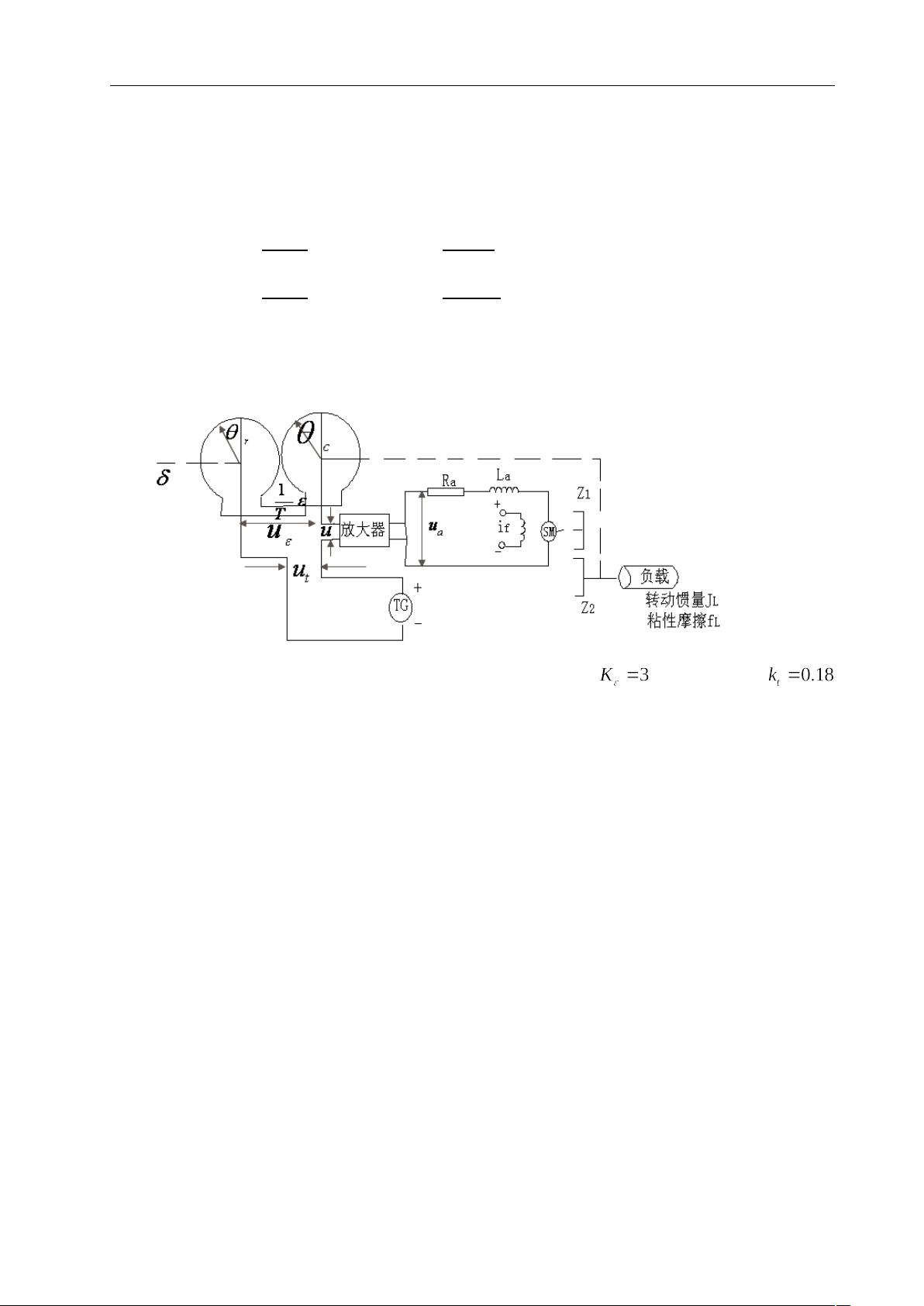
题 目: 位置随动系统建模与频率特性分析
初始条件:
图示为一位置随动系统,放大器增益为 Ka=40,电桥增益 ,测速电机增益
V.s , Ra=7Ω , La=13.25mH , J=0.007kg.m
2
, C
e
=Cm=0.45N.m/A,f=0.18N.m.s, 减 速 比
i=0.2
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要
求)
1、 求出系统各部分传递函数,画出系统结构图、信号流图,并求出闭环传递函数;
2、 用 Matlab 画出开环系统的波特图和奈奎斯特图,并用奈奎斯特判据分析系统的稳
定性。
3、 求出开环系统的截至频率、相角裕度和幅值裕度。
4、 如采样周期为 1,试求开环传递函数的 Z 变换。
指导教师签名: 年 月 日
系主任(或责任教师)签名: 年 月 日
I

剩余11页未读,继续阅读
资源评论


xiaoxiaojianjian
- 粉丝: 10
- 资源: 7









最新资源
- 带有 OpenGL 后端的 V 2D,3D 图形库(DirectX、Vulkan、Metal 即将推出).zip
- 互联网 Java 工程师进阶知识完全扫盲:涵盖高并发、分布式、高可用、微服务、海量数据处理等领域知识
- 带有 Microsoft DirectX 着色器编译器 (dxil 和 spirv) 的 Docker 映像.zip
- jsp登录界面 mysql增删改查操作
- 免费各种文件类型转换完美无水印jar包,导入即可使用
- content_1732693070233.pdf
- linkage-mapper3.0
- 尝试将 DirectX 引入 Common Lisp.zip
- 吃豆人博物馆(PC 版)模式,可像街机版一样玩吃豆人大逃杀 .zip
- mqtt客户端调试助手
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


