前馈-改进PID算法在智能车控制上的应用
需积分: 49 10 浏览量
2009-07-26
11:02:09
上传
评论 1
收藏 111KB DOC 举报

前馈-改进 PID 算法在智能车控制上的应用
时间:2009-06-18 14:26:55 来源:现代电子技术 作者:中国民航大学航空自动化学院 贾翔宇 季厌庸
丁芳
1 引言
智能车系统是一个时变且非线性的系统,采用传统 PID 算法的单一的反馈控制会使系统
存在不同程度的超调和振荡现象,无法得到理想的控制效果。本文将前馈控制引入到了智
能车系统的控制中,有效地改善了系统的实时性,提高了系统的反应速度[1];并且根据智
能车系统的特点,对数字 PID 算法进行了改进,引入了微分先行和不完全微分环节,改善
了系统的动态特性;同时,利用模糊控制具有对参数变化不敏感和鲁棒性强的特点[2],本
文将模糊算法与 PID 算法相结合,有效地提高了智能车的适应性和鲁棒性,改善了系统的
控制性能。
2 改进 PID 算法
智能车的控制是由飞思卡尔公司的 S12 芯片完成,所以对智能车的控制要采用计算机
控制方法。本文针对智能车控制的特殊性,对传统数字 PID 算法做了一些改进,这样可以
更好地满足智能车控制的需要。
2.1 不完全微分 PID
将微分环节引入智能车的方向和速度控制,明显地改善了系统的动态性能,但对于误差
干扰突变也特别敏感,对系统的稳定性有一定的不良影响。为了克服上述缺点,本文在
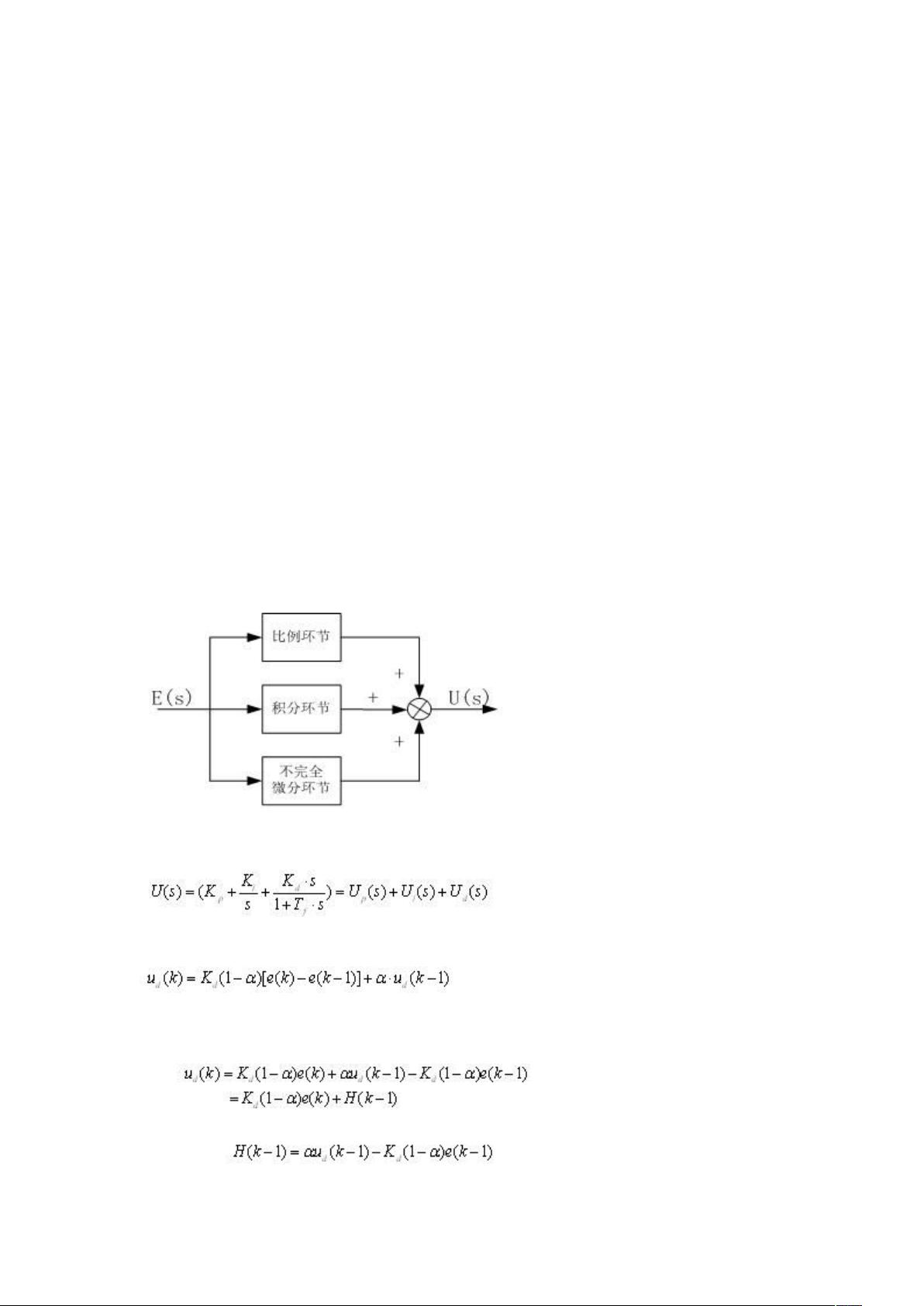
PID 算法中加入了一阶惯性环节[3] ,不完全微分 PID 算法结构如图 1 所示。
图 1 不完全微分 PID 算法机构图
将一阶惯性环节直接加到微分环节上,可得到系统的传递函数为:
(1)
将(1)式的微分项推导并整理,得到方程如下:
(2)
式中, ,由系统的时间常数 和一阶惯性环节时间常数 决定的一个常数。
为了编程方便,可以将 2-2 式写成如下形式:
(3)
式中, 。
资源评论













