DRV8711配置笔记
需积分: 13 163 浏览量
2023-03-05
16:05:40
上传
评论
收藏 1.45MB PDF 举报


1 / 18
DRV8711 寄存器
目录
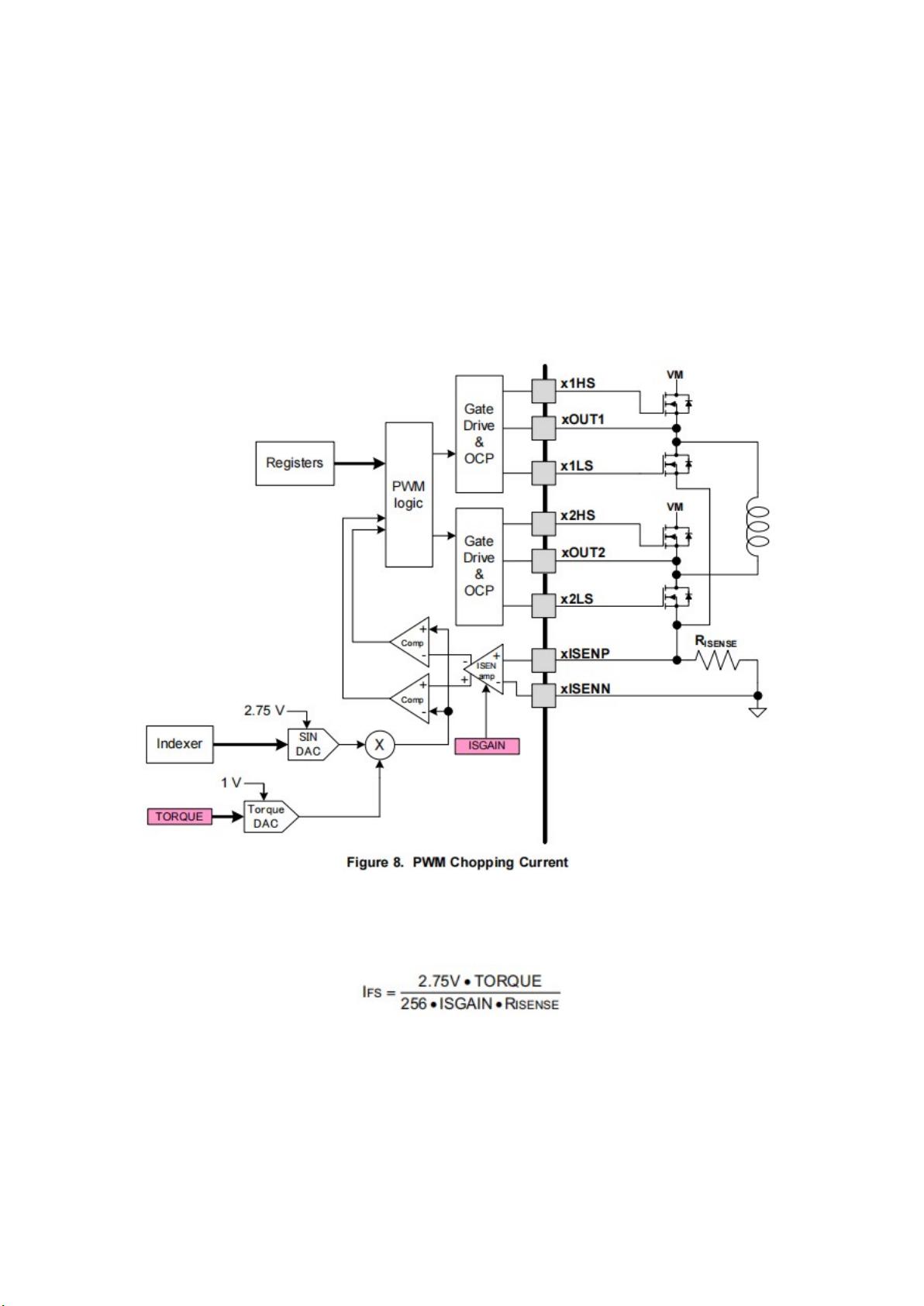
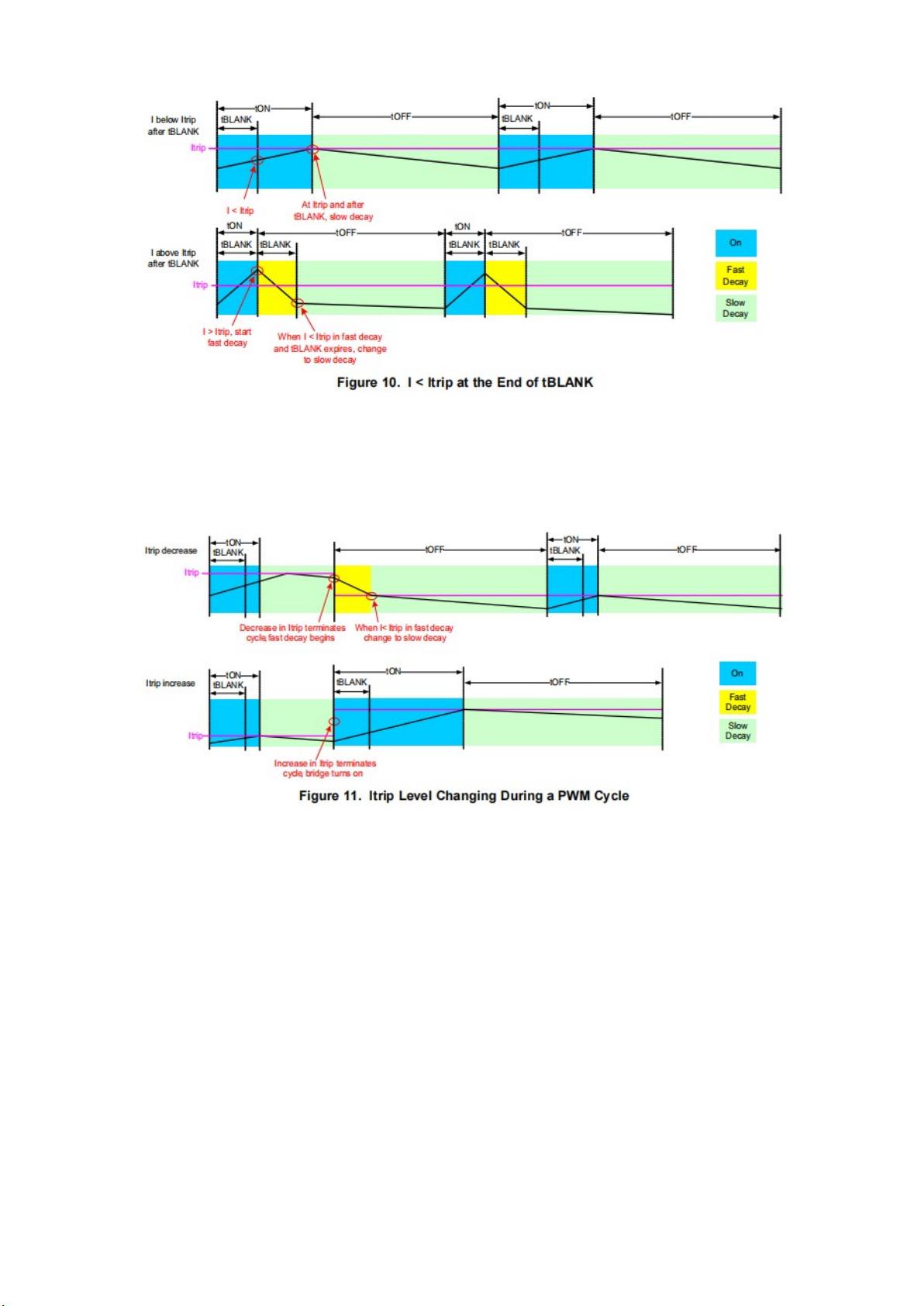
7.3.4 电流调节 .......................................................................................................................... 2
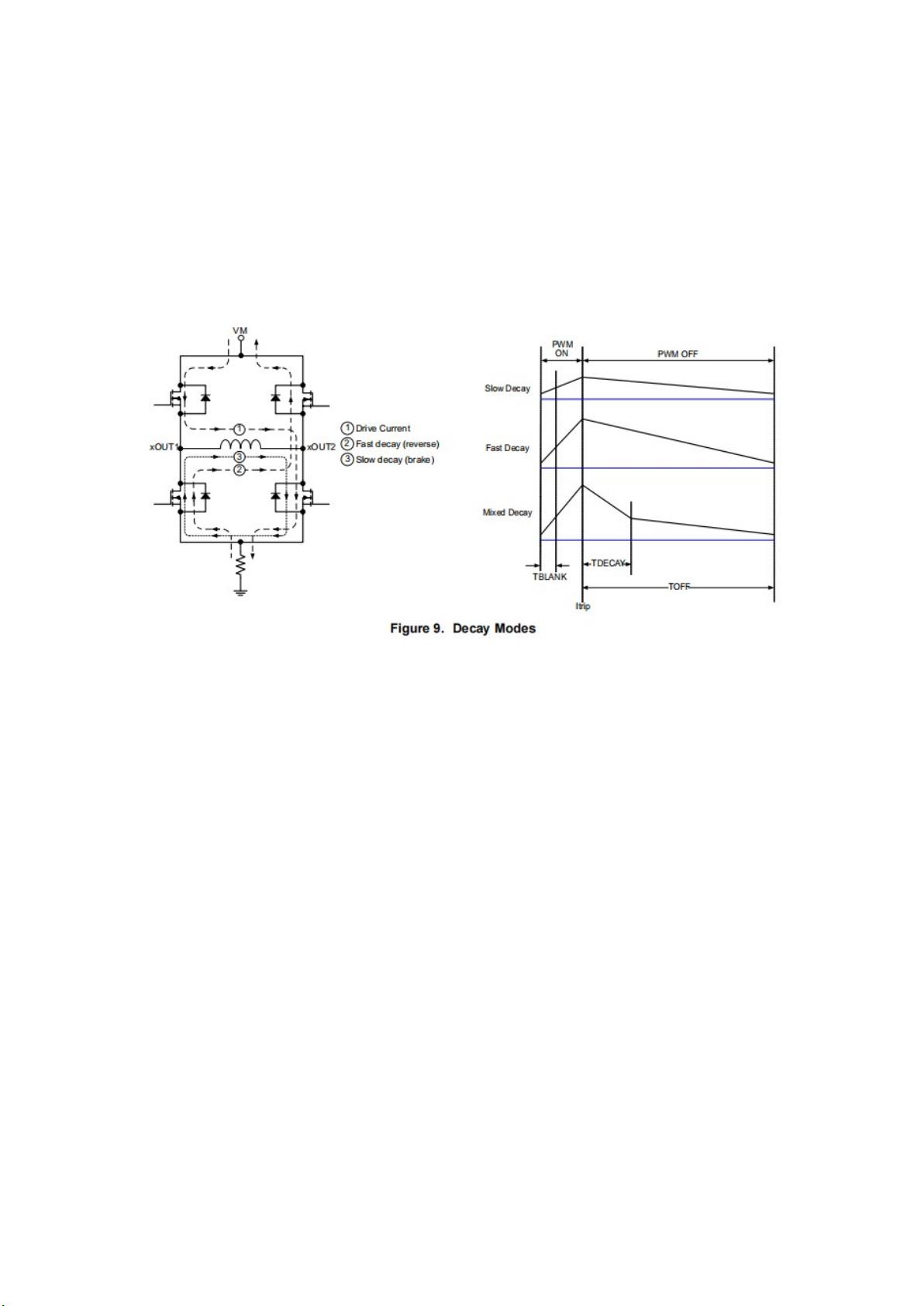
7.3.5 衰减模式 .......................................................................................................................... 3
7.3.6 空白时间 .......................................................................................................................... 5
7.3.7 预处理.............................................................................................................................. 5
7.3.8 配置 Predrivers ................................................................................................................ 7
7.3.9 外部 FET 选择 .................................................................................................................. 7
7.3.10 失速检测 ........................................................................................................................ 8
7.3.10.1 内部失速检测 ..................................................................................................... 8
7.3.10.2 外部失速检测 ..................................................................................................... 9
7.3.11 保护电路 ........................................................................................................................ 9
7.3.11.1 过电流保护(OCP) .......................................................................................... 9
7.3.11.2 Predriver 错误 ................................................................................................... 10
7.3.11.3 热停堆(TSD) ................................................................................................ 10
7.3.11.4 欠压锁定(UVLO) .......................................................................................... 10
7.4 设备功能模式 ........................................................................................................................... 10
7.4.1 复位和休眠操作 ............................................................................................................ 10
7.4.2 微步进驱动电流 ............................................................................................................ 11
7.5 编程 .......................................................................................................................................... 11
7.5.1 串行数据格式 ................................................................................................................ 11
7.6 寄存器映射 ............................................................................................................................... 12
控制寄存器 CTRLR .......................................................................................................... 12
扭矩寄存器 TORQUE ...................................................................................................... 13
寄存器 OFFR ................................................................................................................... 14
寄存器 BLANK ................................................................................................................. 14
寄存器 DECAY ................................................................................................................. 14
寄存器 STALL ................................................................................................................... 15
寄存器 DRIVE .................................................................................................................. 15
状态 STATUS .................................................................................................................... 16
8 应用和实施 .................................................................................................................................. 17
8.1.1 感测电阻器 .................................................................................................................... 17
8.1.2 可选串联栅极电阻器 .................................................................................................... 17
8.2.2 详细设计程序 ................................................................................................................ 17
8.2.2.2 电流调节 ............................................................................................................. 17
8.2.2.3 衰减模式 ............................................................................................................. 18
剩余17页未读,继续阅读
资源评论













