我们知道,多层感知器(包括BP网)的隐节点基函数采用
线性函数,激活函数则采用Sigmoid函数或硬极限函数。与多层
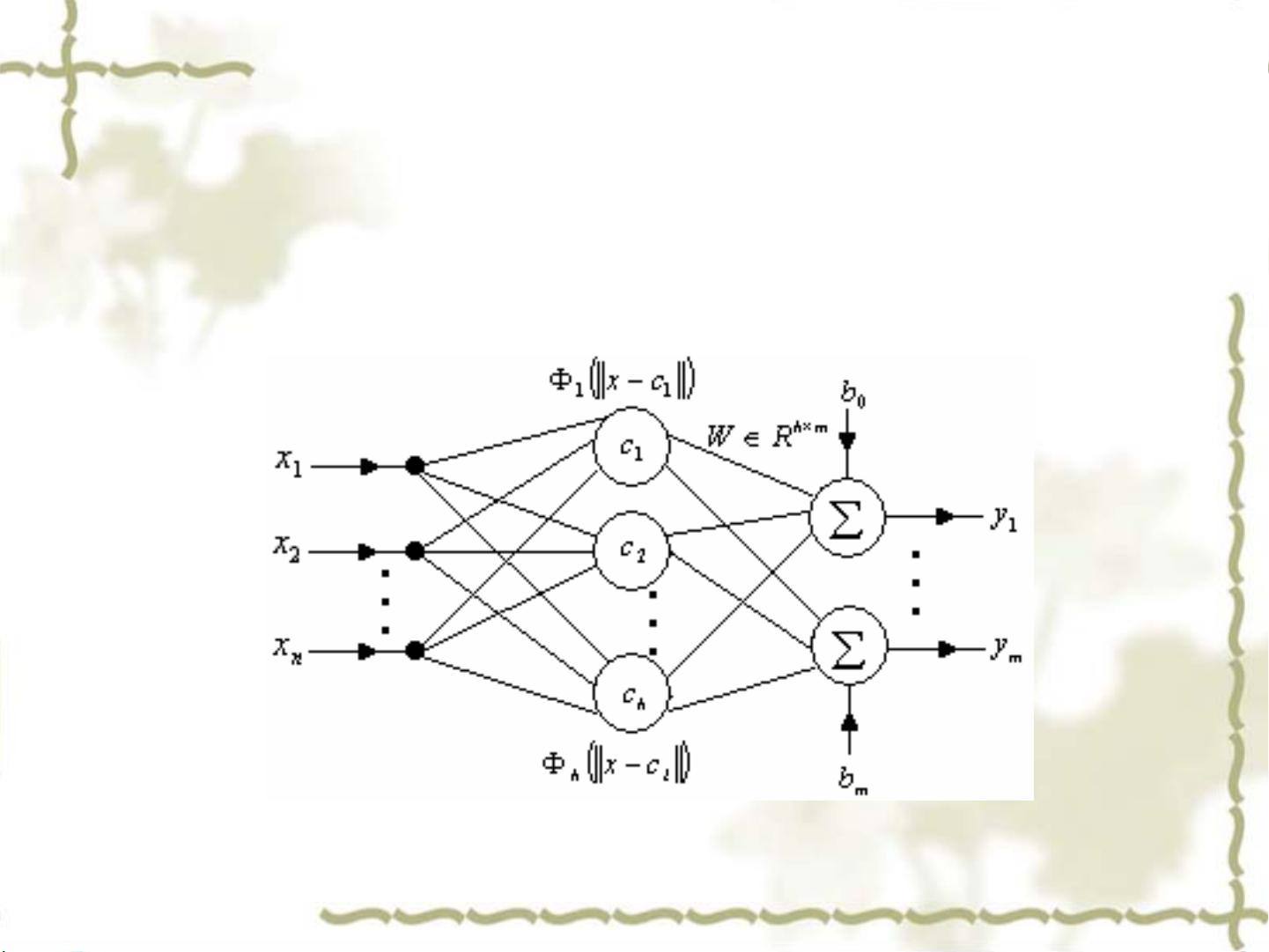
感知器不同,RBF网的最显著的特点是隐节点的基函数采用距
离函数(如欧氏距离),并使用径向基函数(如Gaussian函
数)作为激活函数。径向基函数关于n维空间的一个中心点具有
径向对称性,而且神经元的输入离该中心点越远,神经元的激
活程度就越低。隐节点的这一特性常被称为“局部特性”。因此
RBF网的每个隐节点都具有一个数据中心,如图4.1中c
i
就是网
络中第i个隐节点的数据中心值,
则表示欧氏范数。
∗