模糊 PID 复合控制对水温的控制
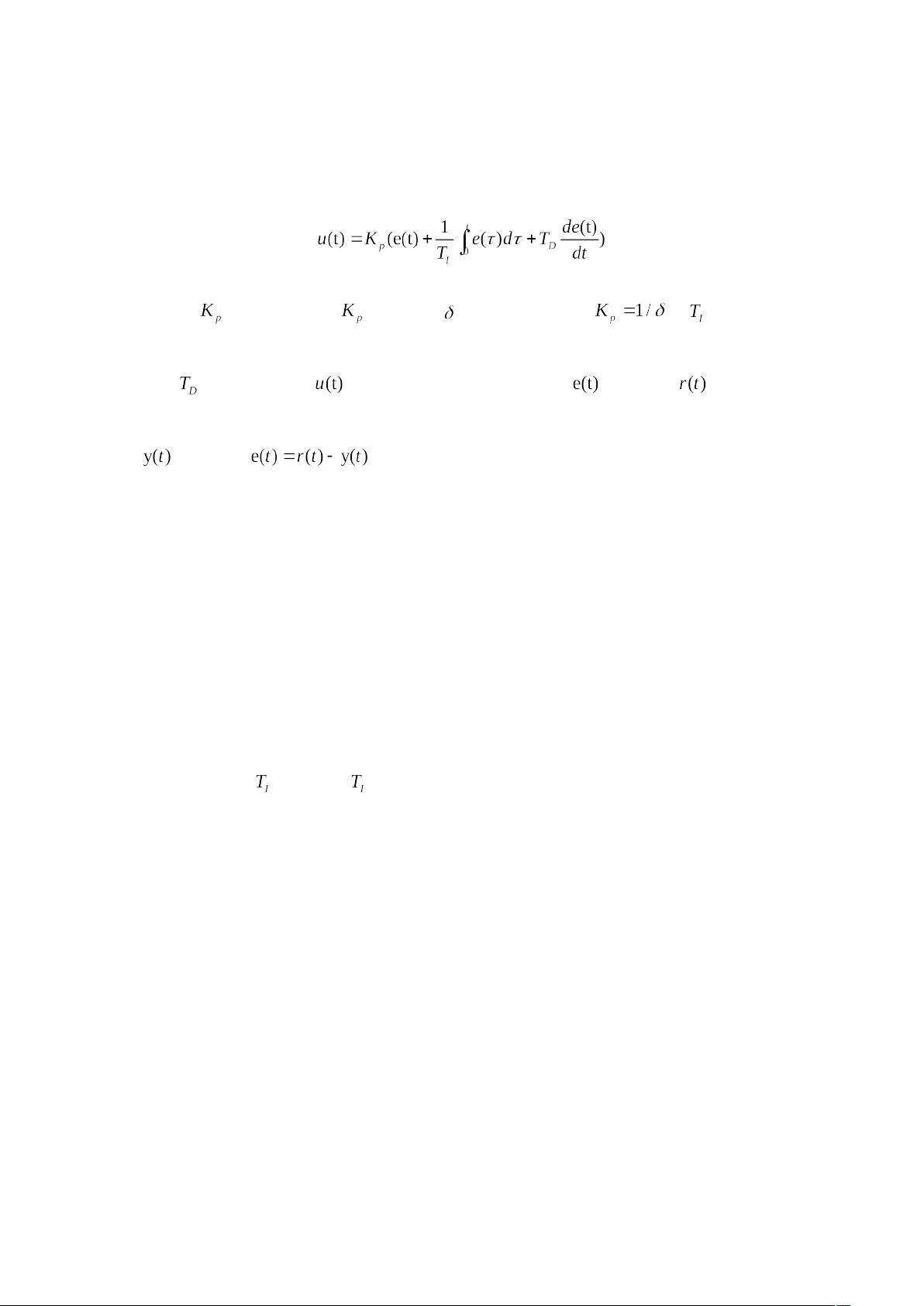
PID 控制就是比例积分微分控制,其控制规律如下:
式中, 为比例增益, 与比例度 成倒数关系,即 ; 为积分时
间; 为微分时间; 为 PID 调节器的输出信号; 为给定值 与测量值
之差(即 )。
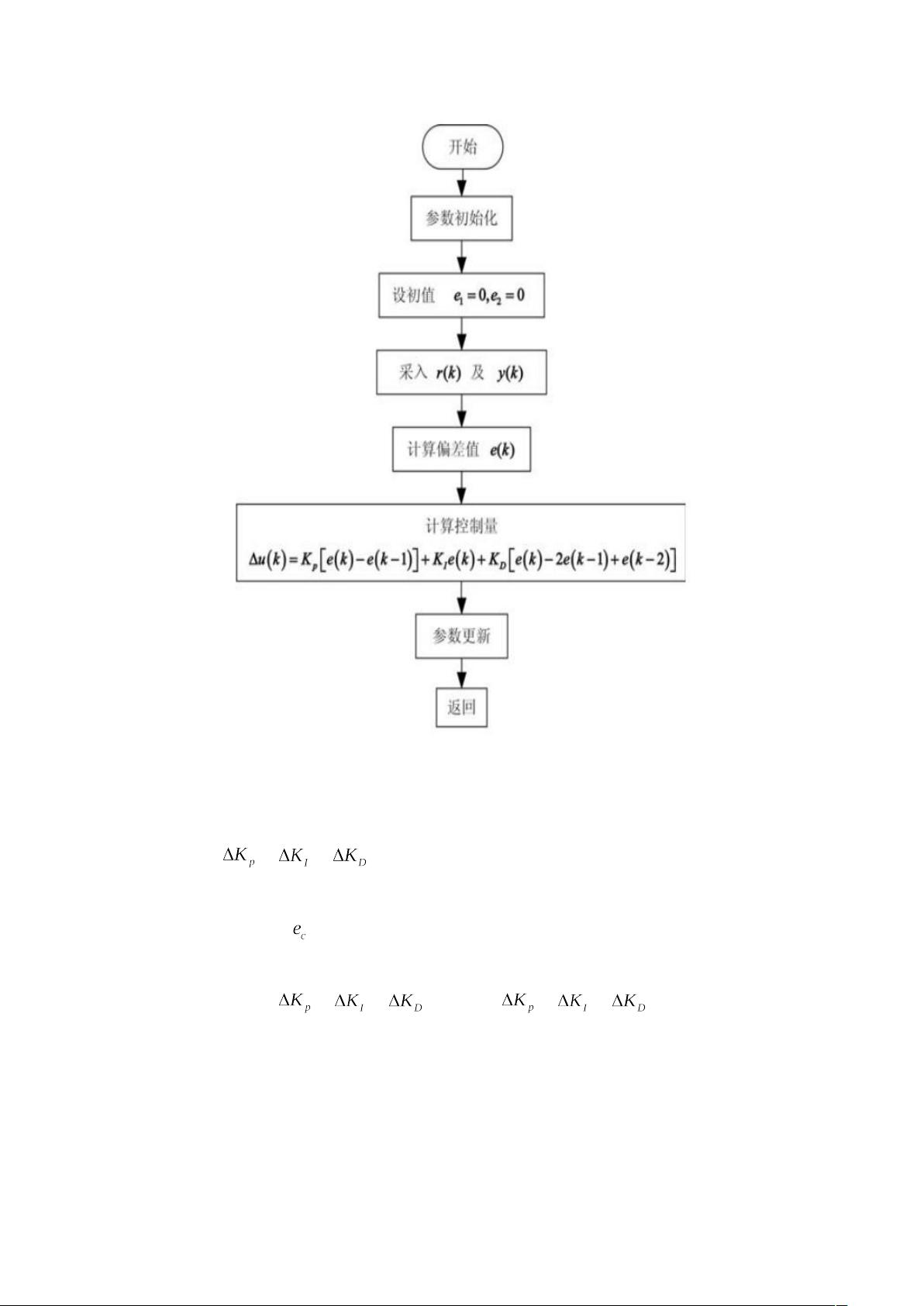
控制输出由三部分组成:
比例环节——根据偏差量成比例的调节系统控制量,以此产生控制作用,
减少偏差。比例系数的作用是加快系统的响应速度,比例系数越大,系统的响
应速度越快,系统的调节精度越高,但容易产生超调,甚至会导致系统的不稳
定;比例系数过小,会降低系统的调节精度,系统响应速度变慢,调节时间变
长,系统动态、静态特性变坏。
积分环节——用于消除静差,提高系统的无差度。积分作用的强弱取决于
积分时间常数 的大小, 越小,积分作用越强。但积分作用过强,会引起系
统的不稳定。
微分环节——根据偏差量的变化趋势调节系统控制量,在偏差信号发生较
大变化以前,提前引入一个早期的校正信号,取到加快系统动作速度,减小调
节时间的作用。但微分作用过强,会引起系统的振荡。
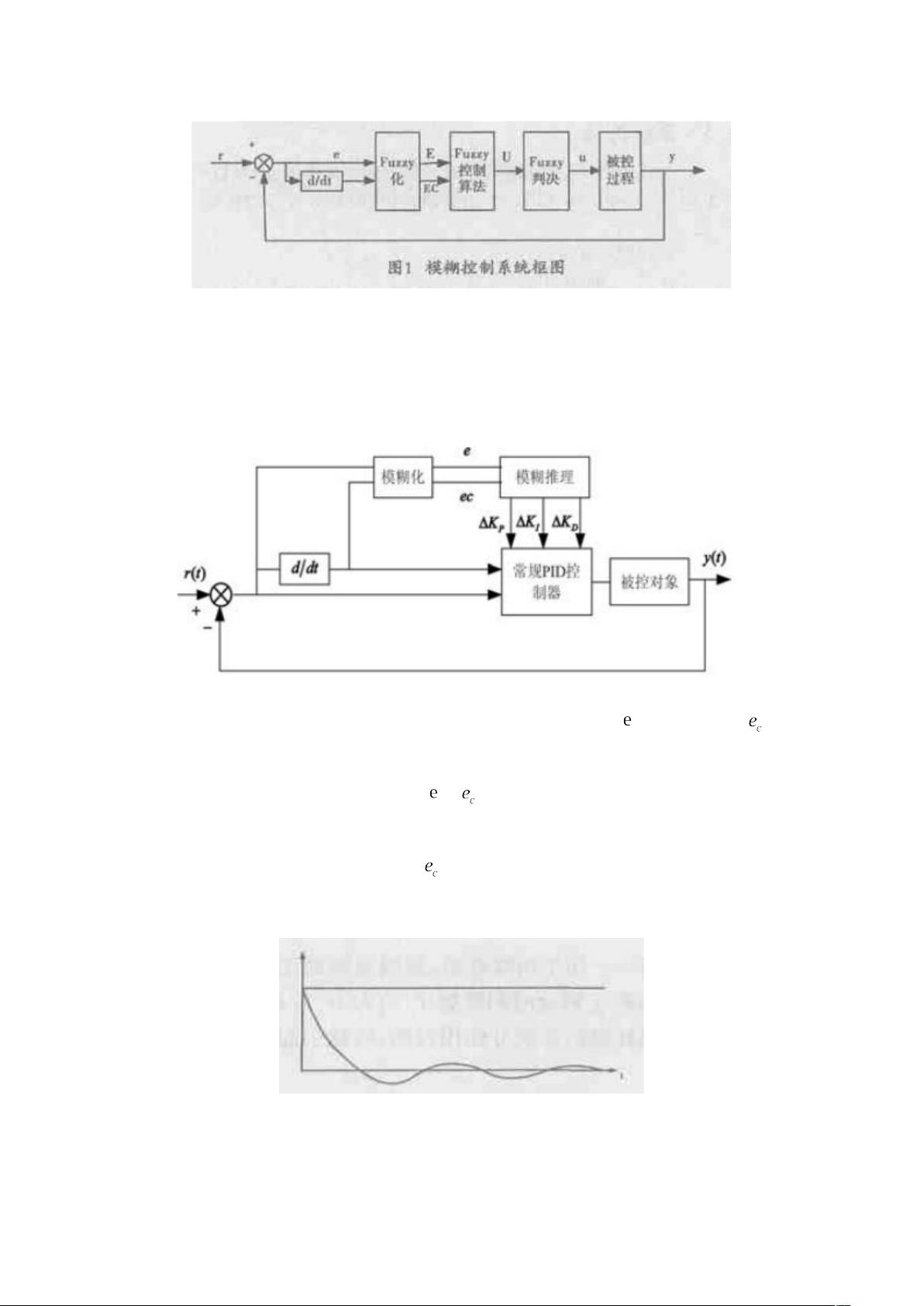
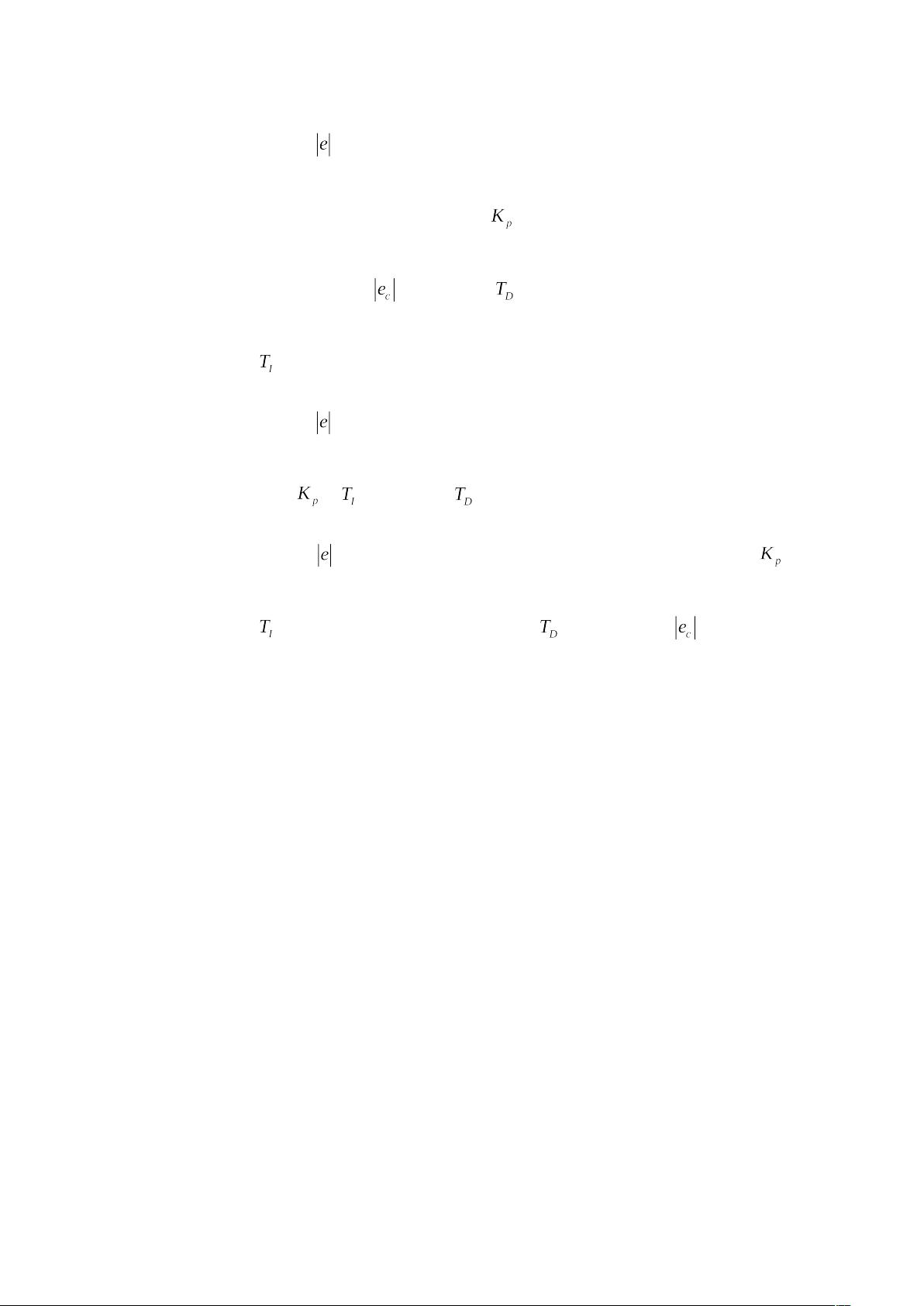
模糊控制是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计
算机控制方法。常规模糊控制器的原理如下: