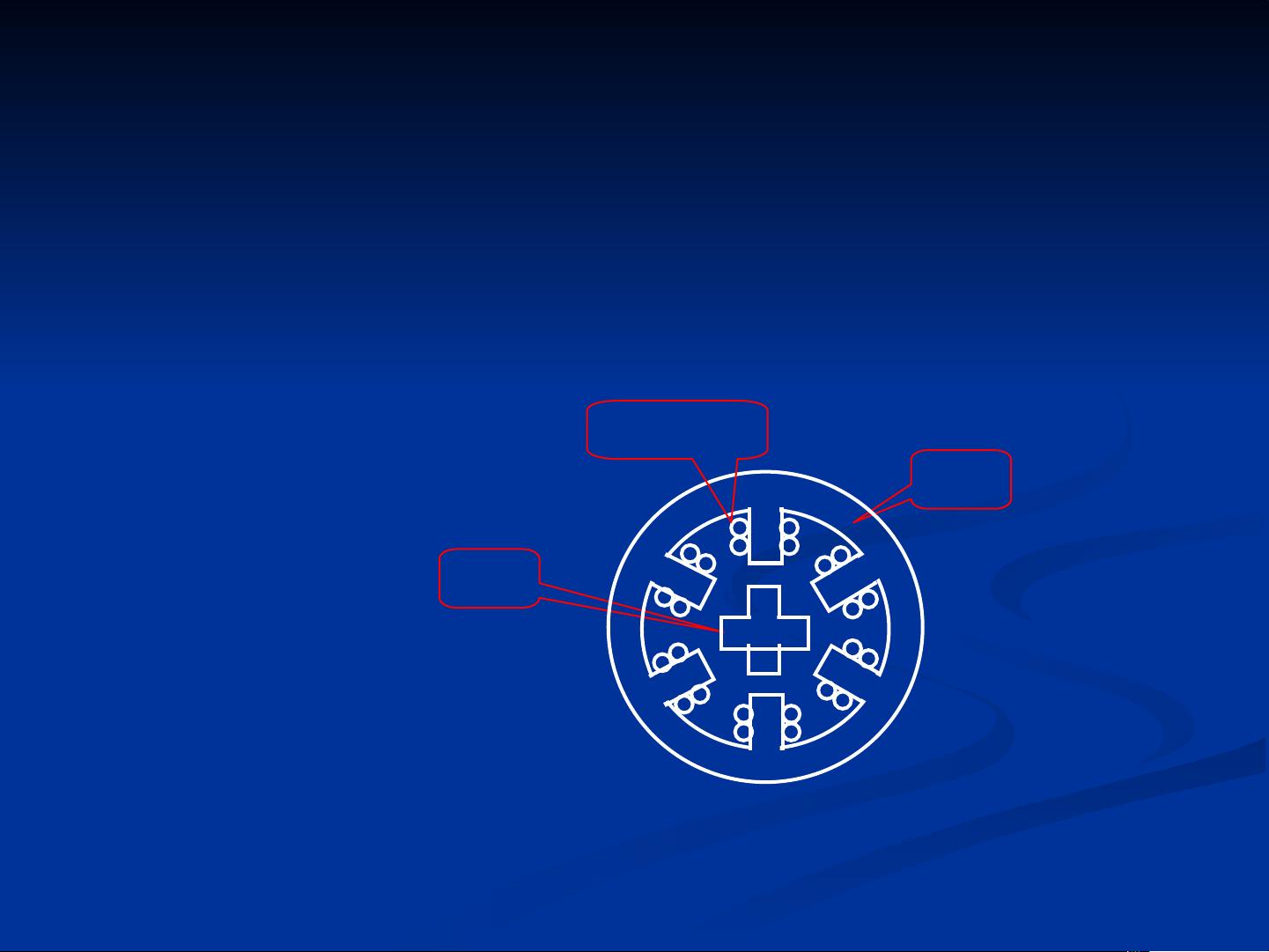
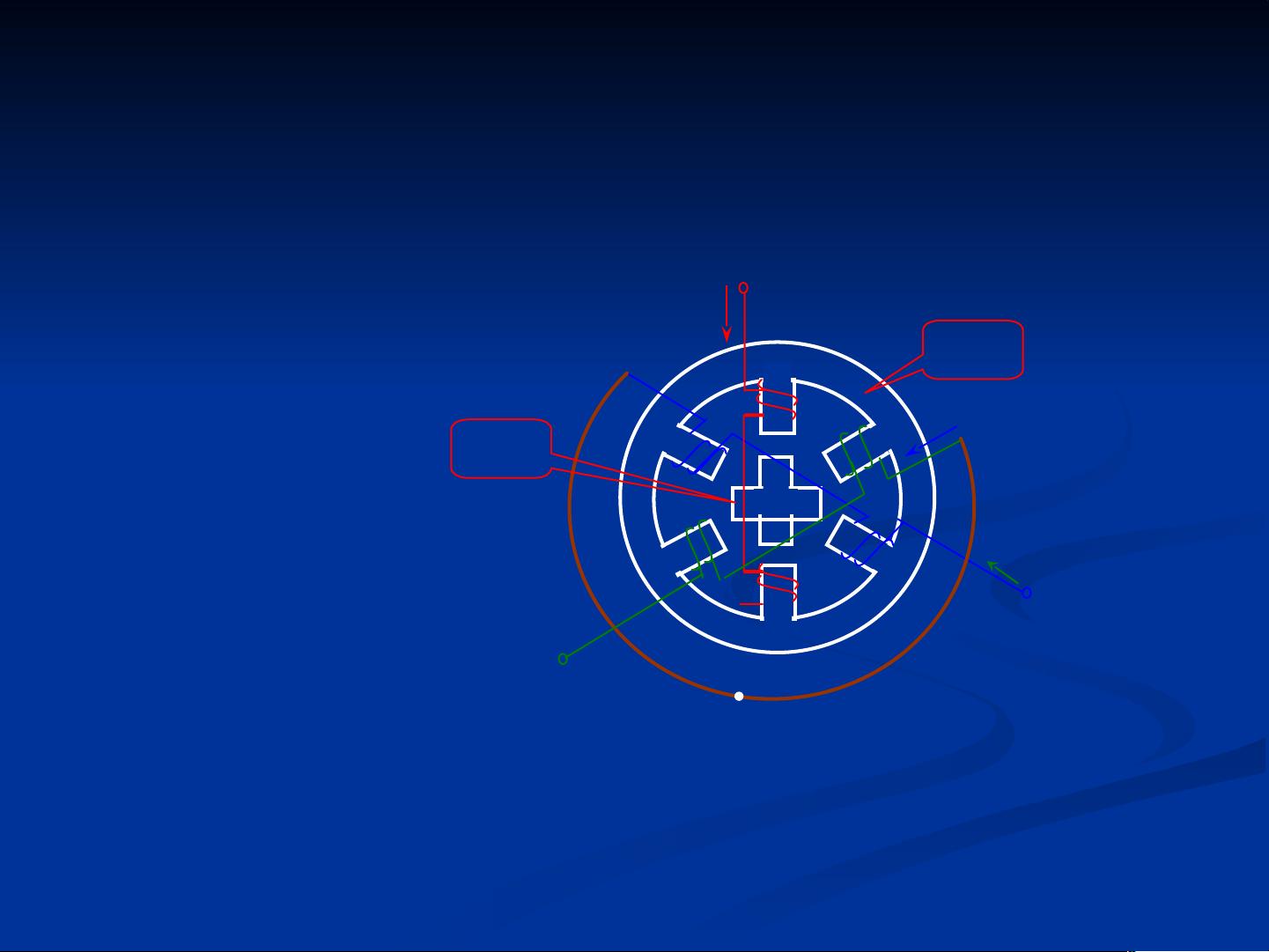
开环步进式伺服系统是一种常见的自动化控制技术,主要用于精确的位置控制。步进电机是这种系统的核心组件,它能够将电信号转化为精确的机械运动。本篇PPT学习教案主要介绍了步进电机的工作原理、分类以及不同的通电方式,旨在帮助读者深入理解步进电机在伺服系统中的应用。 步进电机的工作原理基于电磁吸引,以反应式步进电机为例,定子上有磁极并配有激磁绕组,而转子无绕组,但有均匀分布的齿。当定子磁极通电后,会通过磁力吸引转子的齿,从而实现步进运动。每相磁极由两个相对的磁极组成,这里的“相”不同于三相交流电中的概念,它指的是线圈的连接方式。 步进电机的分类主要依据以下几个方面: 1. 相数:包括三相、四相、五相等,相数越多,步距角越小。通电方式有m相m拍、双m拍和m相2m拍等,其中双拍方式可以提供更平滑的运动。 2. 磁场建立方式:分为反应式和永磁反应式(混合式)。反应式电机由定子绕组产生的反应力矩驱动,而永磁反应式电机则利用永磁体或励磁绕组产生力矩。 3. 输出力矩:分为伺服步进电机和功率步进电机,前者适用于小负载快速定位,后者则能直接驱动工作台,具有较大的输出力矩。 4. 结构:可以是轴向分相式或径向分相式,结构设计的不同会影响电机的性能和适用场景。 步进电机的通电方式对运行特性有很大影响,常见的通电方式有三相单三拍、三相单双六拍、三相双三拍等。比如,三相单三拍工作方式中,每来一个电脉冲,转子转过30°,但因为每次只有一个绕组通电,容易在切换瞬间产生失步。相比之下,三相六拍和双三拍工作方式因为始终保持至少一个绕组通电,使得电机运行更为平稳。 在实际应用中,步进电机的转子齿数通常较多,齿数越多,步距角越小,精度越高。为了优化运行性能,定子磁极的齿距与转子的齿距相匹配,但各极的齿会错开一定角度,这有助于减小步进电机的振动和提高定位精度。 总结来说,开环步进式伺服系统的理解涉及步进电机的工作原理、分类、通电方式和优化策略等多个方面。掌握这些知识对于设计和调试高效、精确的自动化系统至关重要。
剩余55页未读,继续阅读
评论星级较低,若资源使用遇到问题可联系上传者,3个工作日内问题未解决可申请退款~