

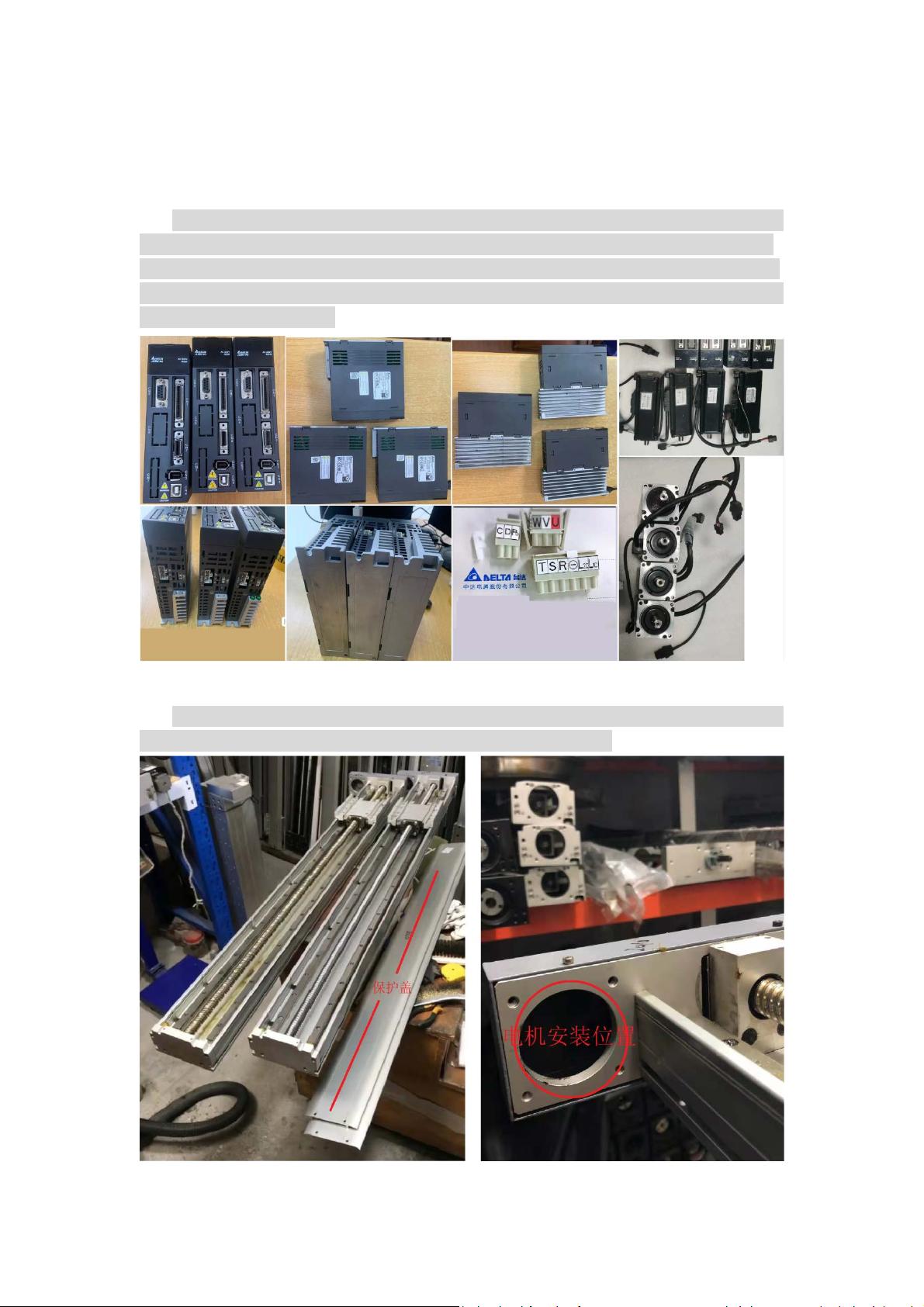
台达伺服电机套装
+Modbus
协议
+VC
源代码
(
2022
年实战攻略)
目录
前言
.................................................................................................................................................. 2
1
、设备及开发环境
......................................................................................................................... 3
1.1
设备清单
........................................................................................................................... 3
1.1.1
台达伺服电机套装
1
套(型号
ASD-A2-0421-L
,
400W
)
................................. 3
1.1.2
丝杠导轨
1
台(有效行程
1
米,转一圈平移
10
毫米)
.................................. 3
1.2
开发环境
........................................................................................................................... 4
2
、设备连线
.................................................................................................................................... 4
2.1
控制器电源线
................................................................................................................... 4
2.2
控制器与电机供电线及信号线
....................................................................................... 4
2.3 CN3
串口连接线
................................................................................................................. 5
3
、辅助用具
.................................................................................................................................... 6
3.1
串口调试工具
................................................................................................................... 6
3.1.1 Modbus
指令格式
................................................................................................... 6
3.1.2
功能码说明
............................................................................................................ 6
3.1.3
实例(可使用串口工具测试)
............................................................................ 6
3.2
台达官方调试工具
........................................................................................................... 7
3.2.1
下载地址
................................................................................................................ 7
3.2.2
操作界面
................................................................................................................ 7
4
、
VC
代码
....................................................................................................................................... 9
4.1 CRC
校验
............................................................................................................................. 9
4.2
搜索及连接串口
............................................................................................................. 10
4.3
速度控制
......................................................................................................................... 17
4.4
前进、后退、停止控制
................................................................................................. 18
4.5
计算位移
......................................................................................................................... 19

剩余19页未读,继续阅读

墨水儿
- 粉丝: 0
- 资源: 4

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



- 1
- 2
前往页