

精品文档
第1章机械手的总体方案设计
1.1 机械手的传动方案设计
按机械手手臂的不同形式及组合情况其活动范围也是不同的,基本上可以分
为四种运动形式:直角坐标式、圆柱坐标式、球坐标式、关节坐标式。根据工作
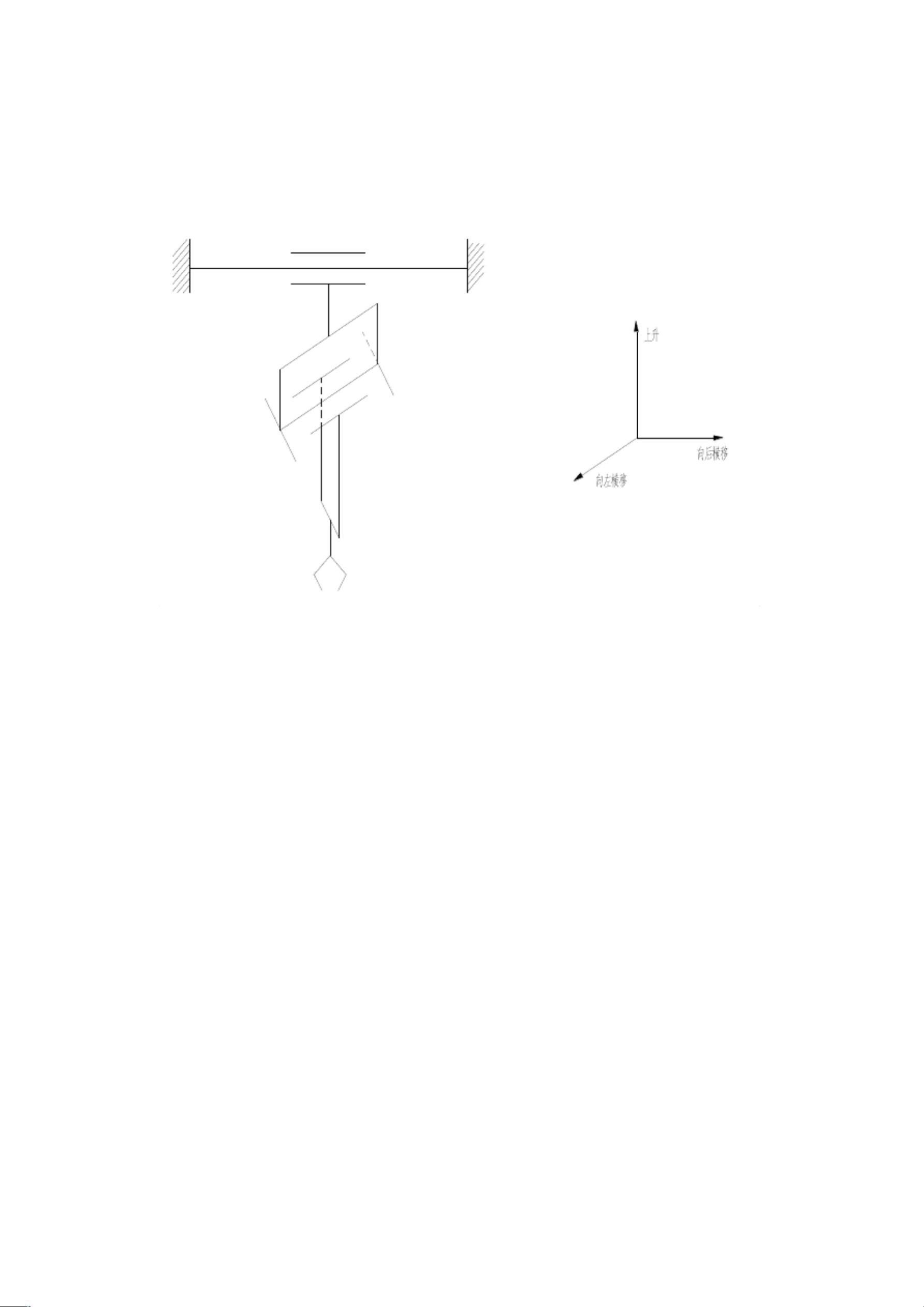
要求可选择直角坐标式,具体设计成悬挂式。其优点为:
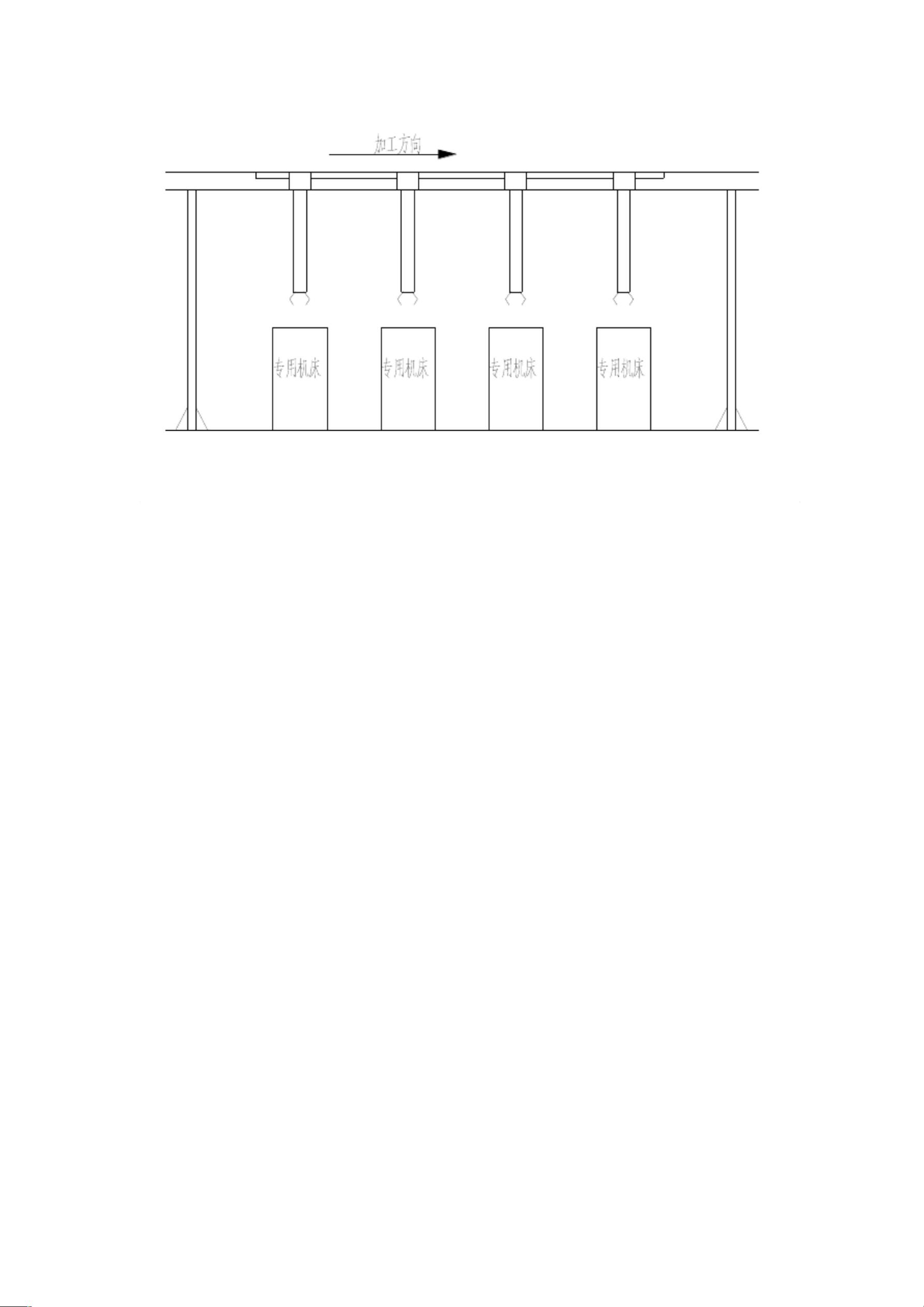
(1)多臂悬挂式的机械手对刚性联结的自动生产线非常实用,可以在各工
位间传递工件,各臂均悬挂在生产线上方的横梁上,臂间距离和工位距离相等,
手臂可同步地沿横梁平移一个工位间距,把工件从一个工位移动到下一个工位,
可以减少随行夹具和其他装置,提高自动化程度。
(2)悬挂式机械手占地面积小,能有效的利用空间。
(3)悬挂式机械手结构简单,成本底。
该凸轮轴加工自动线上的送料机械手采用液压驱动,PLC 控制,其中采取液
压驱动有以下优点:
(1)压力高,可实现较大的驱动力,且机构可以做的轻小,紧凑。
(2)可实现无级变速,定位精度高,系统固有频率小,压力、容量调节容
易。
(3)重量小,惯性小,可以做到快速的变速和换向,控制容易,动作平稳,
滞后小。
1.2 主要技术参数的确定
机械手的主要技术参数包括抓重、自由度、定位精度、重复定位精度、工作
范围、最大速度及承载能力。
主要参数如下:
抓重:
3kg
自由度:
工作范围:
3 个
前后移动:1800mm
上下升降:350mm
横移:50mm
液压驱动
驱动方式:
精品文档
剩余11页未读,继续阅读
资源评论


想要offer
- 粉丝: 4066
- 资源: 1万+









最新资源
- 质量安全排查报告.docx
- 职业中专技工学校专业评估表.docx
- 质量控制资料核查表:建筑保温工程.docx
- 质量目标统计数据表.docx
- 质量内审方案.docx
- 中国古今地名对照表.docx
- 智力残疾评定标准一览表.docx
- 中央造林补助实施方案小班一览表.docx
- 肘关节功能丧失程度评定表.docx
- 重要神经及血管损伤评定.docx
- 自建房安全整治和农村住房建设考评内容和评分标准.docx
- 走访服务企业登记表.doc
- 智能车开发技术的多领域深度解析及应用
- 西红柿叶片图像目标检测数据【已标注,约700张数据,YOLO 标注格式】
- 蓝桥杯开发技术的全面解析与备赛建议
- 相当于去中心化的QQ版本了
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


