没有合适的资源?快使用搜索试试~
我知道了~
文库首页
行业研究
行业报告
电脑连接川崎机器人.pdf
电脑连接川崎机器人.pdf
1.该资源内容由用户上传,如若侵权请联系客服进行举报
2.虚拟产品一经售出概不退款(资源遇到问题,请及时私信上传者)
版权申诉
0 下载量
94 浏览量
2023-04-10
19:21:27
上传
评论
收藏
127KB
PDF
举报
温馨提示
限时特惠:¥4.90
14.90
。
资源推荐
资源详情
资源评论
电脑连接川崎机器人.docx
浏览:169
。
川崎机器人程序.pdf
浏览:84
。
川崎机器人型号查看.pdf
浏览:138
川崎机器人型号,对机器人感兴趣的可以看看,网上资料太少了。
川崎机器人R系列安装与连接手册.pdf
浏览:26
川崎机器人R系列安装与连接手册pdf,本手册介绍了川崎机器人R系列的安装与连接的方法。
川崎Kawasaki机器人-BA006N系列 中空弧焊机器人.pdf.pdf
浏览:107
川崎Kawasaki机器人-BA006N系列 中空弧焊机器人.pdfpdf,川崎机器人在物流生产线上提供了多种多样的机器人产品,在饮料、食品、肥料、太阳能、煉瓦等各种领域中都有非常可观的销量。川崎的码垛搬运等机器人种类繁多,...
KAWASAKI川崎 机器人F控手册
浏览:14
5星 · 资源好评率100%
川崎机器人 F控制器的相关手册包括以下手册: 90202-1112DCI(R安装和连接).pdf 90202-1183DCB(F控安装和连接).pdf 90203-1114DCA(F控操作).pdf 90204-1029DCA(F控外部IO).pdf 90205-1127DCF(R系列检查和维护)....
西门子1200TCPIP通讯实例程序,客户端川崎机器人.rar
浏览:28
使用博图V16,西门子1200PLC与川崎机器人实现TCP/IP通讯
川崎机器人外部IO手册.pdf
浏览:116
川崎机器人编程学习资料,编程手册,全中文,详细上手快,适合新手自学 介绍了川崎机器人E系列控制器使用的AS语言。包括系统概述,基本类型,数据用法
川崎K系列机器人样本.pdf
浏览:145
川崎K系列机器人样本pdf,川崎K系列机器人选型介绍
川崎弧焊机器人样本.pdf
浏览:9
川崎弧焊机器人样本pdf,川崎弧焊机器人选型介绍
川崎M码垛机器人样本.pdf
浏览:165
川崎M码垛机器人样本pdf,川崎M码垛机器人选型介绍
川崎机器人M系列手册.pdf
浏览:169
川崎机器人M系列手册pdf,川崎机器人M系列手册
川崎机器人常用指令表.pdf
浏览:158
5星 · 资源好评率100%
类型 指令 格式 示例 作用 JMOVE JMOVE 位姿 JMOVE p1 各轴移动 LMOVE LMOVE 位姿 LMOVE p1 直线移动 DELAY DELAY 时间 DELAY 2 停止运动制定时长 JAPPRO JAPPRO 位姿,移动量 JAPPRO p1,20 各轴移动到目标上方/下方 LAPPRO LAPPRO 位姿,移动量 LAPPRO p1,20 直线移动到目标上方/下方 J
川崎机器人控制器E系列 故障查找和排除手册.pdf
浏览:153
川崎机器人控制器E系列 故障查找和排除手册。川崎机器人控制器E系列 故障查找和排除手册.
川崎机器人控制器E系列操作手册.pdf
浏览:64
5星 · 资源好评率100%
川崎机器人控制器E系列操作手册
川崎机器人(天津有限公司)——CX系列大型通用机器人.pdf
浏览:92
#资源达人分享计划#
川崎机器人E系列AS语言参考手册.pdf
浏览:26
川崎机器人E系列AS语言参考手册
川崎机器人手册.rar
浏览:79
川崎机器人使用手册(里面包含川崎所有的使用手册,共29个PDF文件)
川崎机器人拆跺码垛程序.pdf
浏览:114
川崎机器人拆跺码垛程序.pdf
川崎机器人点焊系列样本.pdf
浏览:58
川崎机器人点焊系列样本pdf,川崎机器人点焊B系列选型介绍
川崎机器人编程指令【大全】.pdf
浏览:78
。
川崎机器人实训总结.pdf
浏览:138
。
川崎机器人报警代码.pdf
浏览:120
5星 · 资源好评率100%
PO104 非法的机器人编号。 PO105 非法程序 PO106 非法的优先级。 PO107 无效的坐标值。 PO108 语法错误。 PO109 无效语句。 PO110 请指明命令的全拼。 PO111 当前模式下不能使用该条命令/指令。 PO112 不能用D0指令...
川崎机器人编程应用入门培训教程.pdf
浏览:54
5星 · 资源好评率100%
川崎机器人编程应用入门培训教程.pdf
川崎机器人Z系列产品手册.pdf
浏览:83
川崎机器人Z系列产品手册pdf,川崎机器人Z系列机器人产品选型参考
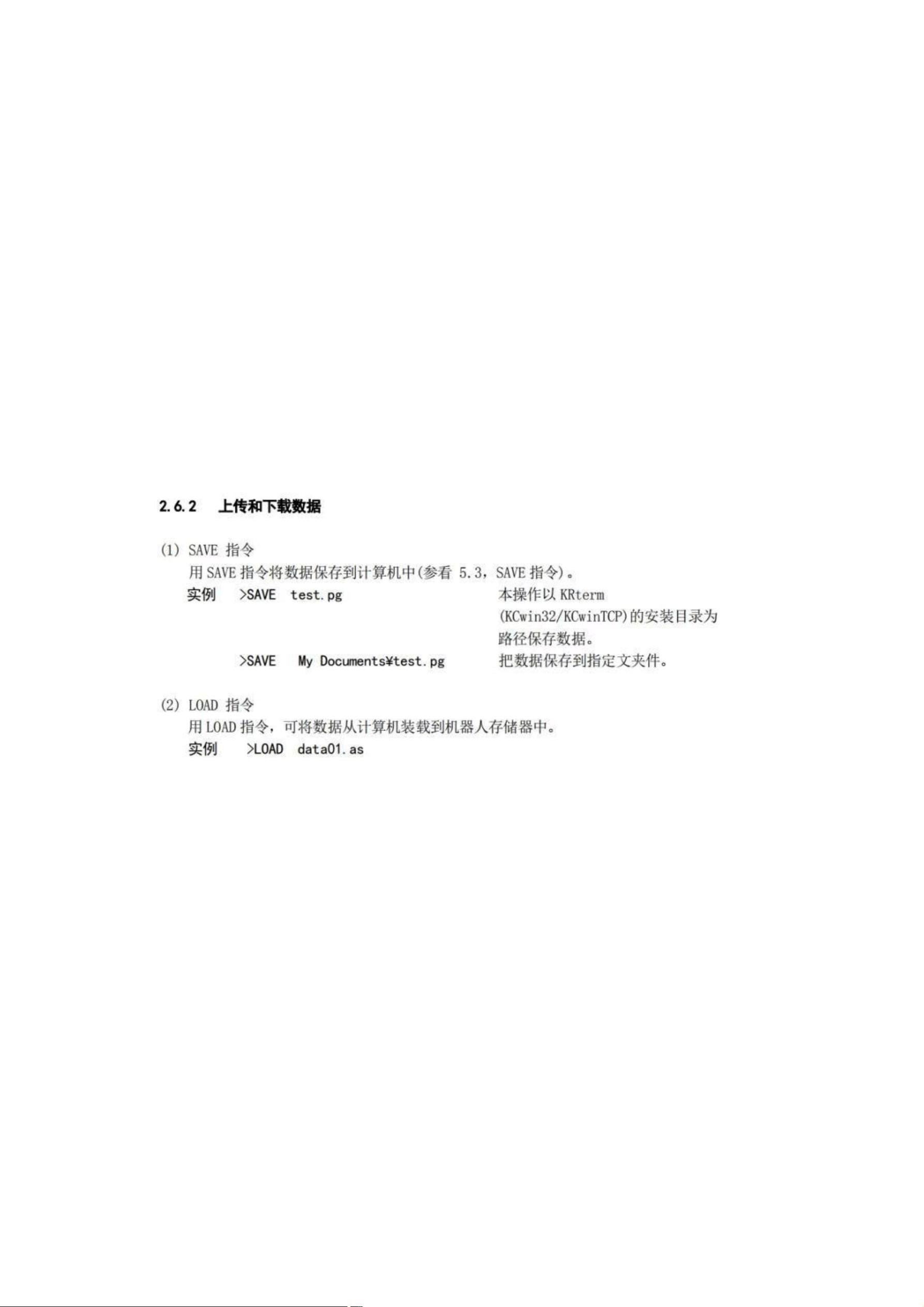
计算机连接川崎机器人步骤
1.
网线连接笔记本和机器人
2.
笔记本
IP
改为与机器人同一网段的
IP
3.
打开“
Krterm
”软件
4.
点击设置按钮,弹出对话框,将
IP
地址改为机器人
IP
5.
点击黄色闪电标,输入“
as
”
,回车
6.
输入
“指令”
+
“文件名”
(格式不需要写,
保存后默认为
.as
)
7.
本内容试读结束,
登录后
可阅读更多
下载后可阅读完整内容,剩余0页未读,
立即下载
评论
收藏
内容反馈
1.该资源内容由用户上传,如若侵权请联系客服进行举报
2.虚拟产品一经售出概不退款(资源遇到问题,请及时私信上传者)
版权申诉
限时特惠:¥4.90
14.90
资源评论
资源反馈
评论星级较低,若资源使用遇到问题可联系上传者,3个工作日内问题未解决可申请退款~
联系上传者
评论
若♡
粉丝: 6172
资源:
1万+
私信
上传资源 快速赚钱
我的内容管理
展开
我的资源
快来上传第一个资源
我的收益
登录查看自己的收益
我的积分
登录查看自己的积分
我的C币
登录后查看C币余额
我的收藏
我的下载
下载帮助
前往需求广场,查看用户热搜
最新资源
2109010044_胡晨燕_选课管理数据库设计与实现.prj
帕鲁介绍的PPT备份没什么好下的
demo1-202405
两种方式修改Intel网卡MAC地址
服务器搭建所需资源:static文件夹
Vue02的源码学习资料
Python 程序语言设计模式思路-行为型模式:访问者模式:在不改变被访问对象结构的情况下,定义对其元素的新操作
Vue01的相关代码资料
蓝桥杯单片机第十二届国赛题
Linux 常用命令参考手册, 日常运维的最佳拍档
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈
安全验证
文档复制为VIP权益,开通VIP直接复制
信息提交成功