机器人中文(2-2).pdf
需积分: 9 159 浏览量
2022-03-23
23:02:12
上传
评论
收藏 3.02MB PDF 举报

-6-
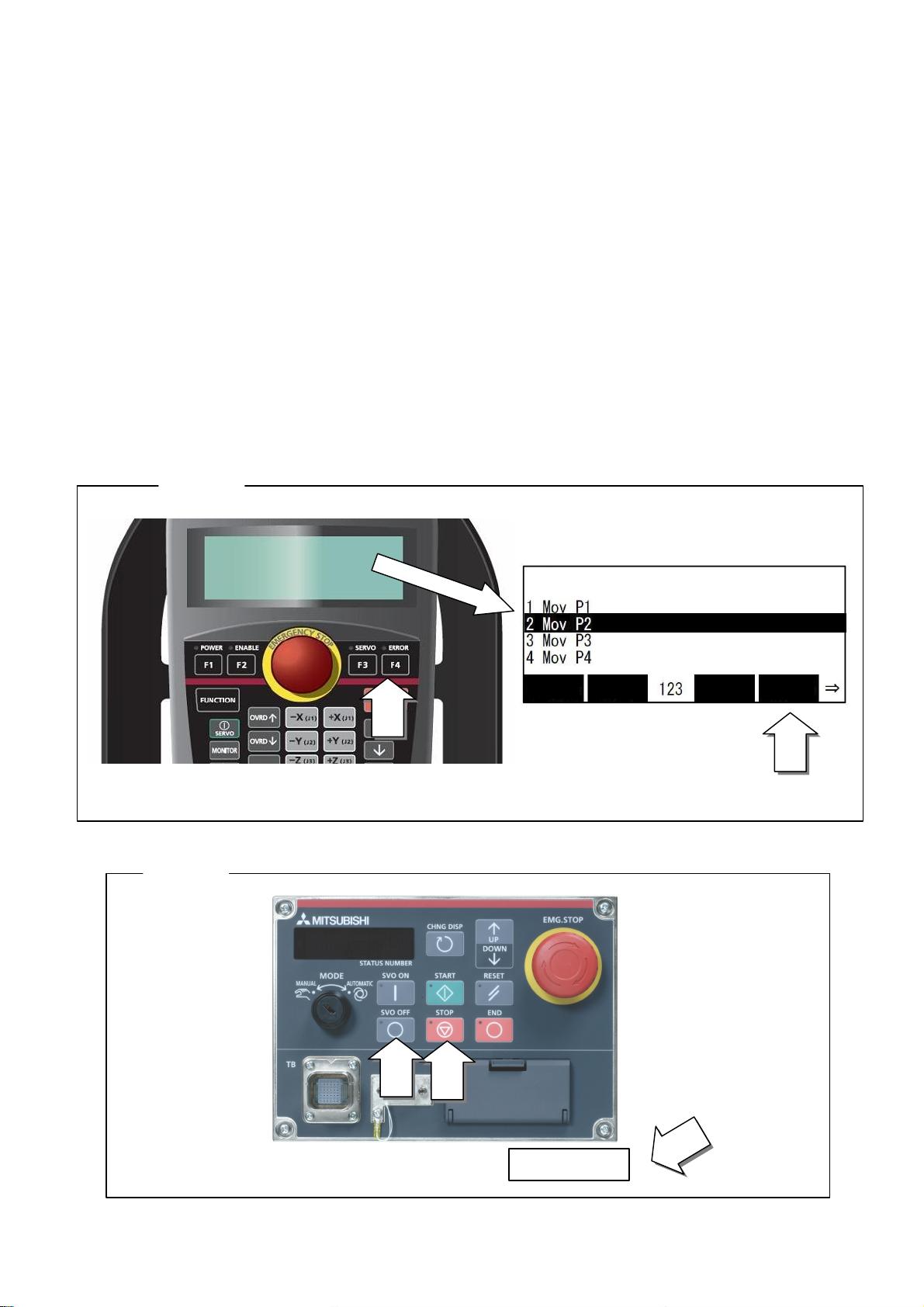
(2)控制电源的 OFF
以下介绍将电源置于 OFF 时的步骤:
1) 机器人的停止确认
在机器人动作的状态下,按压操作盘或者示教单元的停止键,停止机器人。
2) 程序文件的关闭(处于程序编辑状态、示教作业状态时)
按压示教单元的 F4 键(关闭)。
[注意]如果未进行关闭操作,程序将不被保存而丢失。
3) 伺服电源的 OFF
按压操作盘的“伺服 OFF”按钮。
4) 控制电源开关的 OFF
示教单元
1)
2)
操作盘
1)
3)
4)
电源开关
<程序> 1
直接 切换 关闭




剩余69页未读,继续阅读
资源评论


七恒自动化丁工
- 粉丝: 12
- 资源: 7









最新资源
- 使用react框架 借助umi搭建的纯净版快速开发平台
- css网页设计简介及基础教程和实用案例分析及特点阐述.rar
- 编译原理简介及基础教程和实用案例分析及特点阐述.rar
- 后缀表达式求值简介及基础教程和实用案例分析及特点阐述.rar
- JavaScript模块化:深入理解和实践
- GESP一级C++集训课
- 渔具租赁系统 JAVA+Vue.js+SpringBoot+MySQL
- 历史学习网站 JAVA+Vue.js+SpringBoot+MySQL
- 加油站管理系统 JAVA+Vue.js+SpringBoot+MySQL
- neural-network-learning-master.zip 神经网络学习
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


