数据结构大作业 导航系统报告

1
一、系统概述
1.开发环境:windows 10,Clion2022
2.开发语言:C++
3.设计内容:设计学校的平面图,至少包括 10 个以上的场所,每两个场所间可以有不同的
路,且路长也可能不同,找出从任意场所到达另一场所最短路径,以及从任意场所到达所有
场所的最短路径。
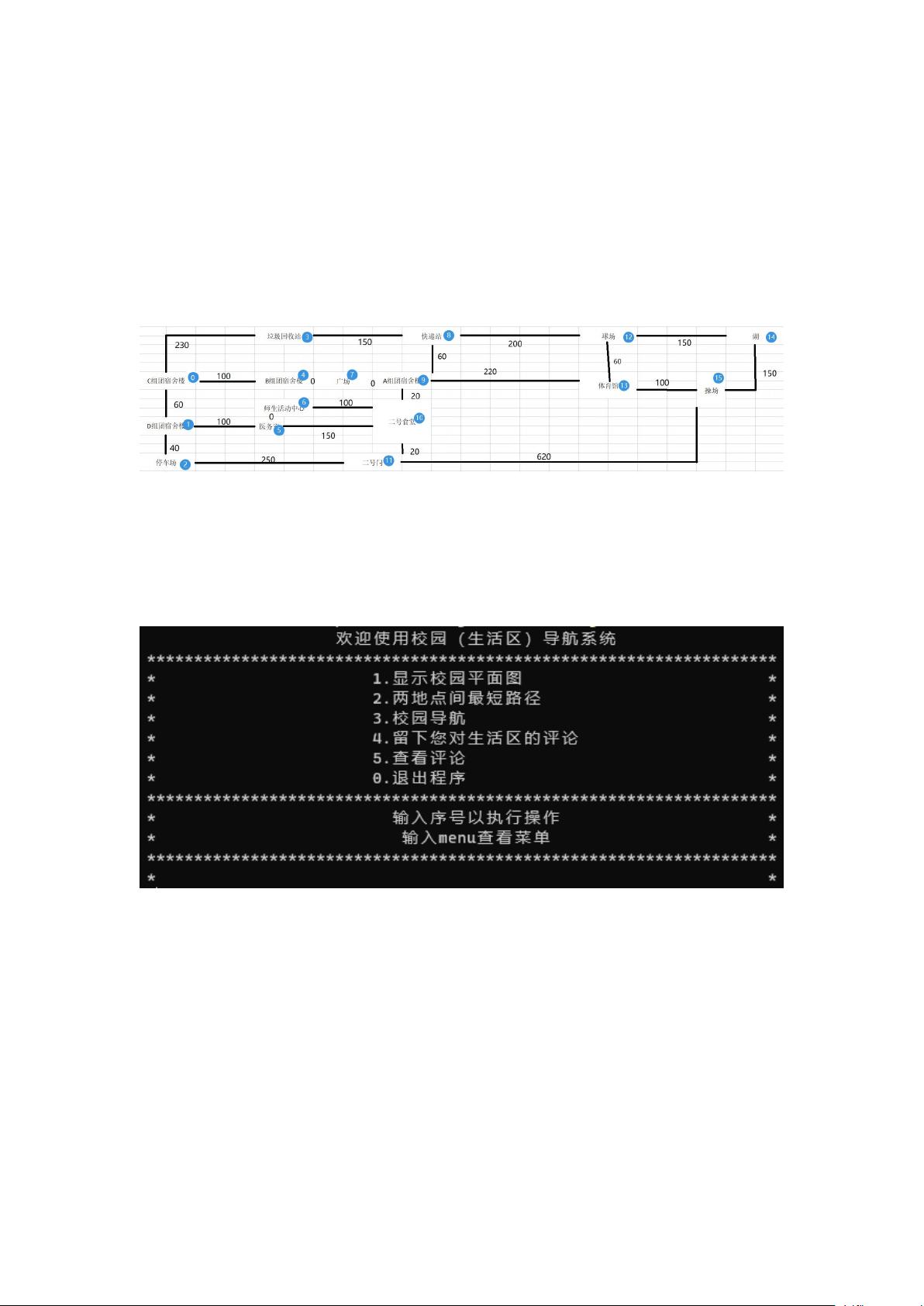
图 1-1 学校平面图设计
(1)地点设置介绍:如图 1-1 所示,设计图共计 16 个场所,并进行了编号(从 0 开始);
(2)顶点间的距离值:各顶点间距离值如图 1-1 所示,单位为米。
4.用户需求:
图 1-2 菜单
图 1-2 展示了本程序初步设计的菜单,通过命令行实现用户交互,基本功能如下:
a) 显示校园平面图:打印校园平面图;
b) 两地点间最短路径:由用户输入起点、终点,并输出最短距离值与最短路径;
c) 校园导航:由用户选择当前位置,输出“从当前位置开始,到达所有场所,最终返回当
前位置”的最短距离、路径;
d) 留下评论:读取用户输入评论,写入文件;
e) 查看评论:从文件中读取评论并打印。
5.设计思想:
a) 图的存储:将校园地图通过邻接矩阵进行存储;
b) 两地点间最短路径:在初始化时,通过 Dijkstra 算法计算出任意两点间的最短距离、
剩余11页未读,继续阅读
资源评论

 章满莫2023-07-24这份导航系统报告详实,对数据结构的应用举例生动,值得一读。
章满莫2023-07-24这份导航系统报告详实,对数据结构的应用举例生动,值得一读。 小明斗2023-07-24对于导航系统的优化方案,作者进行了合理性分析,提出了可行的改进措施。
小明斗2023-07-24对于导航系统的优化方案,作者进行了合理性分析,提出了可行的改进措施。 城北伯庸2023-07-24导航系统报告中的代码实现简洁高效,体现了作者的编程功底。
城北伯庸2023-07-24导航系统报告中的代码实现简洁高效,体现了作者的编程功底。 曹多鱼2023-07-24导航系统报告对用户需求的综合考虑周全,为实际使用提供了可靠的参考。
曹多鱼2023-07-24导航系统报告对用户需求的综合考虑周全,为实际使用提供了可靠的参考。 代码深渊漫步者2023-07-24作者在导航系统报告中提出了一些新颖的解决方法,对问题的分析深入透彻。
代码深渊漫步者2023-07-24作者在导航系统报告中提出了一些新颖的解决方法,对问题的分析深入透彻。












