基于光谱分布特性的快速垂直扫描形貌测量.docx
版权申诉
77 浏览量
2023-02-23
20:47:19
上传
评论
收藏 893KB DOCX 举报


摘要
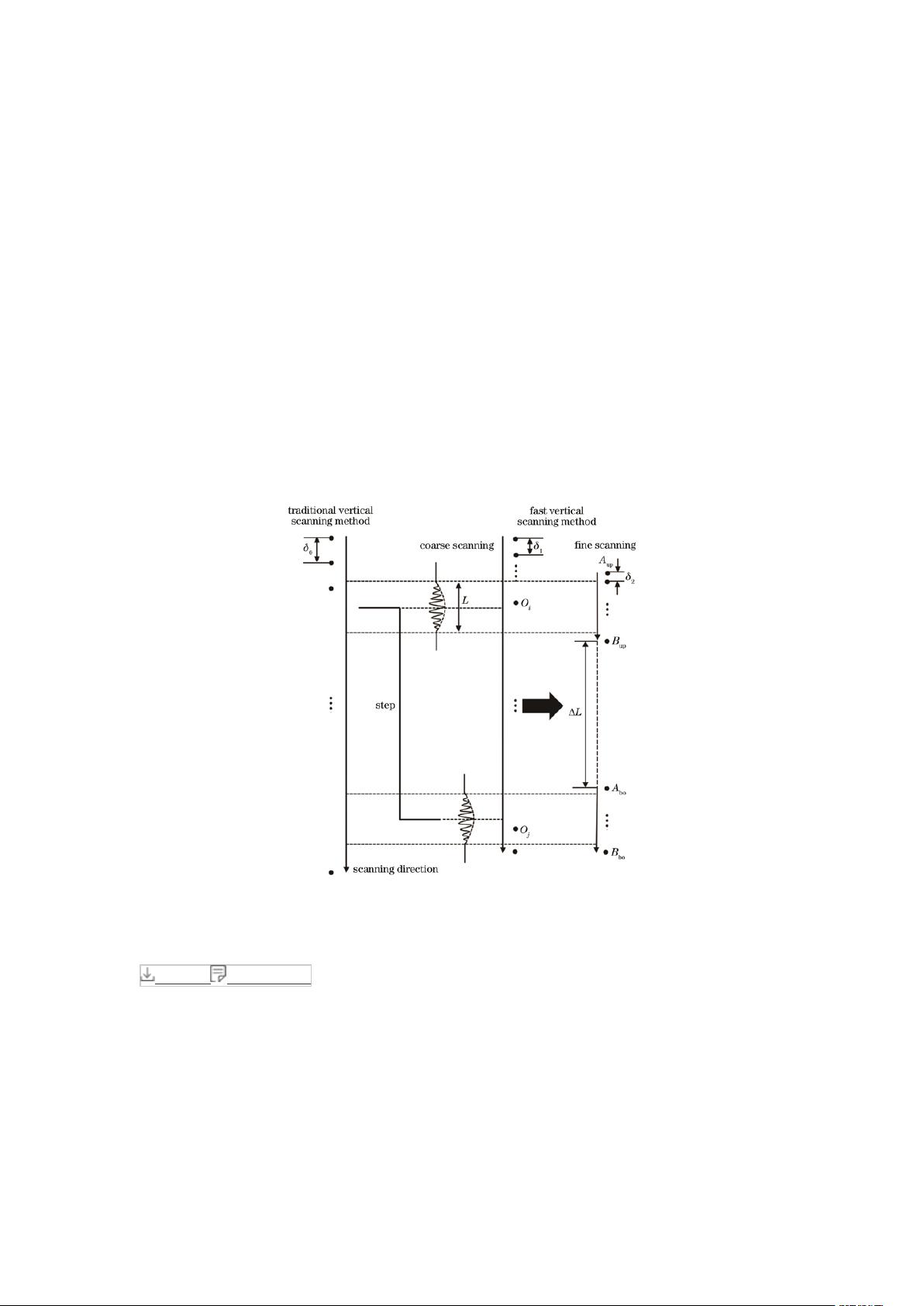
传统的低相干垂直扫描方法在测量高度达数十或数百微米的台阶或沟槽类微结构的表面三
维形貌时,测量效率低下。为此,提出一种基于光谱分布特性的快速垂直扫描形貌测量方
法,该方法包含两次垂直扫描过程。建立描述单幅干涉图条纹对比度的评价函数,利用粗
扫描来定位被测件上下表面的大致位置,并联系上下两幅粗扫描图像计算出覆盖被测件上
下表面相干区域的精扫描采图区域。精扫描在其他区域直接跳过但记录位移量,结合 π/2
扫描移相的精扫描干涉图复原被测件的表面三维形貌。粗扫描的扫描步长由低相干光谱分
布计算得到,精扫描步长为中心波长的 1/8。以高度为 7.805 μm 的台阶板和深度为
200.99 μm 的沟槽进行实验,结果表明,所提方法相比传统垂直扫描方法的采图时间分别
缩短了 48.2%和 55.2%。
Abstract
The traditional low-coherence vertical scanning method has low measurement efficiency
when measuring the three-dimensional surface topography of steps or groove-like
microstructures with a height of tens or hundreds of microns. For this reason, a fast
vertical scanning topography measurement method based on spectral distribution
characteristics is proposed, and this method includes twice vertical scanning processes.
An evaluation function to describe the fringe contrast of a single interferogram is
established, the approximate position of the upper and lower surfaces of the test object is
located by coarse scanning, and the upper and lower coarse scanning images are
connected to calculate the image acquisition areas of the fine scanning that cover the
coherent areas on the upper and lower surfaces of the test object. The fine scanning is
not performed in other areas, but its displacement is recorded. With the fine scanning
interferogram of π/2 scanning phase shift, the three-dimensional surface topography of
the test object is restored. The scanning step length of the coarse scanning is calculated
based on the low-coherence spectral distribution, and the step length of the fine scanning
is one-eighth of the center wavelength. Experiments on the step with a height of 7.805
μm and the groove with a depth of 200.99 μm show that the proposed method reduces
the acquisition time by 48.2% and 55.2% respectively, compared with the traditional
vertical scanning method.
1 引言
传统低相干垂直扫描方法在测量微结构表面三维形貌时,通常以 λ0/8λ0/8(λ0λ0 为低相
干光的中心波长)的扫描步长(对应的移相间隔为 π/2)等间距垂直扫描
[1]
。对于高度达

剩余12页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4032
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











