基于深度学习的表面缺陷检测方法综述.docx
版权申诉
87 浏览量
2023-02-23
20:19:33
上传
评论
收藏 927KB DOCX 举报

表面缺陷检测是机器视觉领域中非常重要的一项研究内容, 也称为 AOI (Automated
optical inspection)或 ASI (Automated surface inspection), 它是利用机器视觉设备获取图像来
判断采集图像中是否存在缺陷的技术. 目前, 基于机器视觉的表面缺陷装备已经在各工业领
域广泛替代人工肉眼检测, 包括 3C、汽车、家电、机械制造、半导体及电子、化工、医
药、航空航天、轻工等行业. 传统的基于机器视觉的表面缺陷检测方法, 往往采用常规图像
处理算法或人工设计特征加分类器方式. 一般来说, 通常利用被检表面或缺陷的不同性质进
行成像方案的设计, 合理的成像方案有助于获得光照均匀的图像, 并将物体表面缺陷明显地
体现出来. 一种方式是针对被检表面颜色选择光源, 例如文献[1]中选择复合白色光源成像
彩色布匹表面缺陷. 另一种常见的方式是依据被检测表面反射性质选择不同成像方案, 主要
包括明场成像、暗场成像和混合成像等. 例如, Chen 等
[2]
针对金属易拉罐凹凸底部的表面缺
陷检测, 设计了两个同心放置的圆锥环形明场光源, 用于同时照亮易拉罐底部的中央和外围
区域. Tao 等
[3]
采用了暗场成像对大口径光学元件表面微弱划痕进行检测. 虽然精心构造的
成像方案能够大大减轻经典检测算法设计的难度, 但也增加了检测系统的应用成本. 同时在
很多开放式的工业环境下(如图 1(b)和图 1(d)所示的自然场景), 期待设计的成像系统完全消
除场景或者被检材料等变化对检测系统的影响, 往往不太现实. 在真实复杂的工业环境下,
表面缺陷检测往往面临诸多挑战, 例如存在缺陷成像与背景差异小、对比度低、缺陷尺度
变化大且类型多样, 缺陷图像中存在大量噪声, 甚至缺陷在自然环境下成像存在大量干扰等
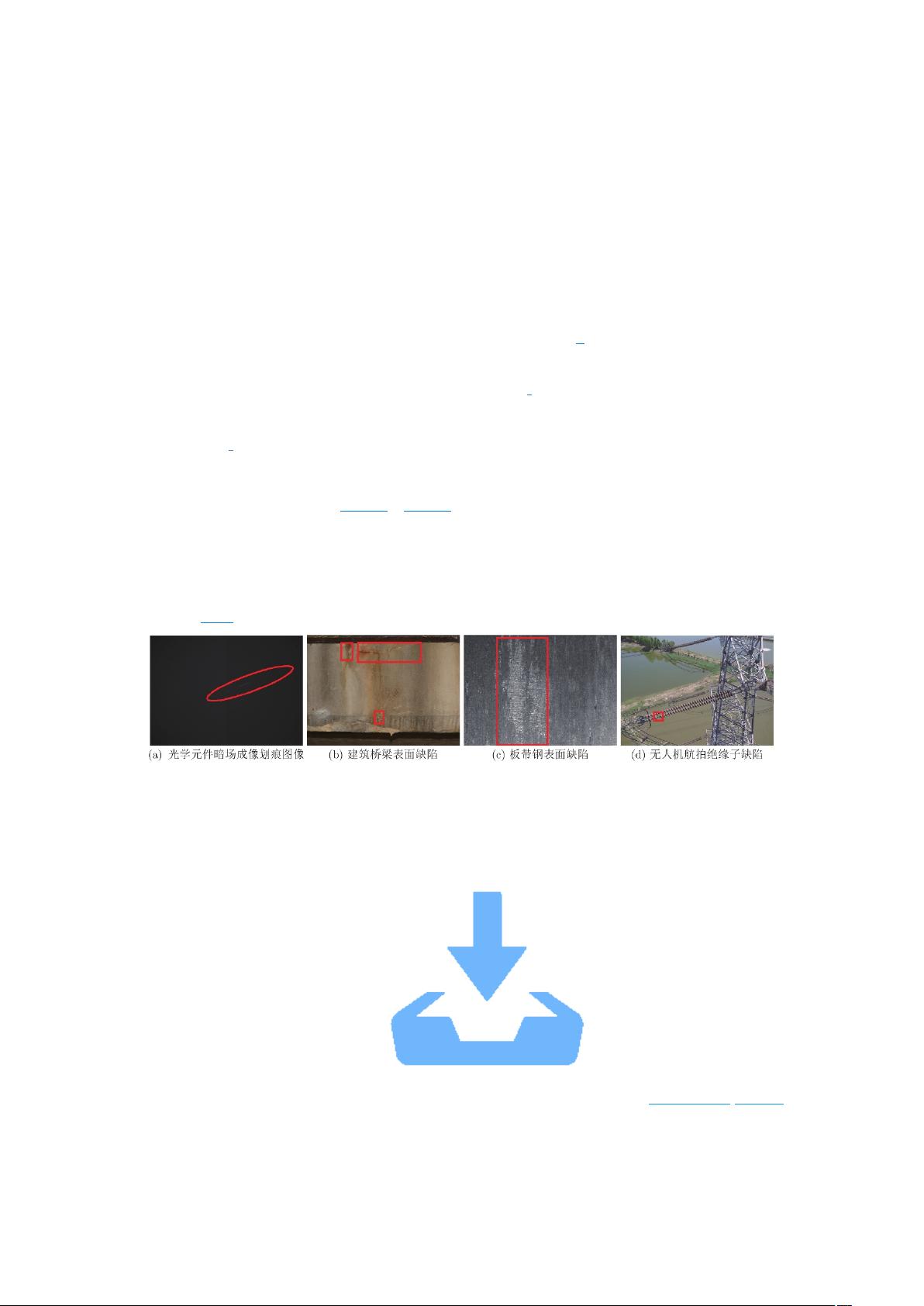
情形, 如图 1 所示, 此时经典方法往往显得束手无策, 难以取得较好的检测效果.
图 1 复杂工业环境下的表面缺陷图像
Fig. 1 Images of surface defects in complex industrial environment ((a) Scratch image of dark
field image of optical component; (b) Surface defect of building bridge; (c) Strip surface defect;
(d) Unmanned aerial vehicle insulator defect)
下载: 全尺寸图片 幻灯片
近年来, 随着以卷积神经网络(Convolutional neural network, CNN)为代表的深度学习模
型在诸多计算机视觉(Computer vision, CV)领域成功应用, 例如人脸识别、行人重识别、场



剩余21页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3551
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











