

在 21 世纪, 社会发展伴随着快速增长的资源需求, 为开采丰富的海洋资源, 海洋工程
领域日益受到全球各国关注. 在这种情况下, 积极发展海洋装备设施技术至关重要. 深海起
重机在海洋工程中扮演着重要角色, 例如海底隧道的搭建、跨海桥梁等项目中水下吊装作
业和水下补给等任务. 因此, 针对深海起重机的研究具有非常重要的实际意义.
然而, 由于起重机的固有结构, 其所吊运负载的运动无法直接驱动, 只能通过台车运动
间接控制, 从而产生欠驱动自由度(即负载摆角). 这种待控自由度多于控制输入的系统, 被
称作欠驱动系统
[1-4]
. 欠驱动系统在工业生产中普遍存在, 如欠驱动机械臂
[5]
、下肢外骨骼
[6]
、无人机系统
[7]
、欠驱动 TORA(Translational oscillators with rotating actuator)系统
[8]
以及欠
驱动起重机系统
[9-10]
, 其中欠驱动起重机系统又可细分为桥式起重机系统
[11-13]
、塔式起重机
系统
[14-15]
、桅杆式起重机系统
[16]
、伴有双摆特性的起重机系统
[17-18]
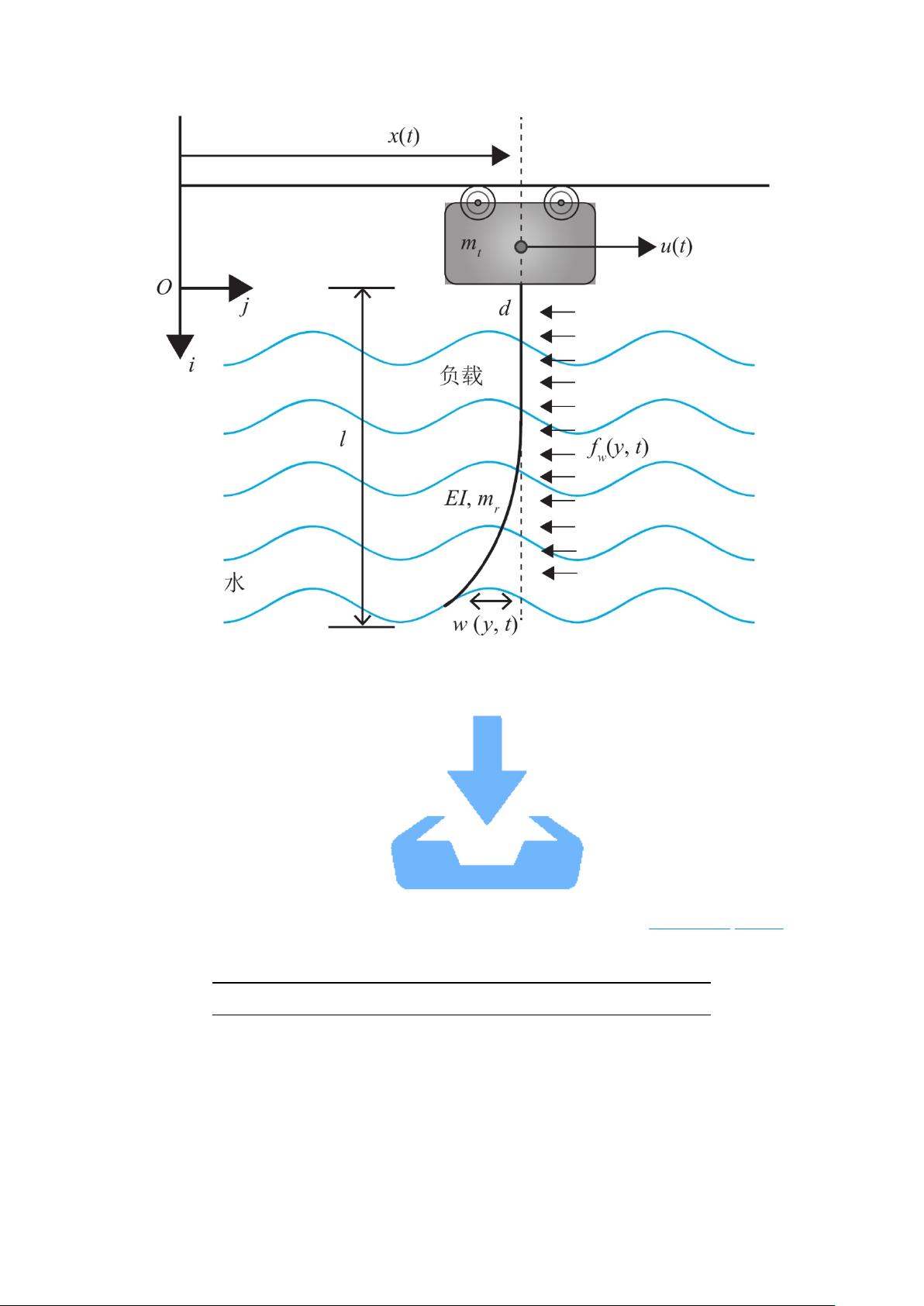
等. 本文研究的深海起重
机系统是一种在水下环境运输负载的欠驱动桥式起重机系统. 一方面, 系统本身存在复杂的
欠驱动特性、非线性与耦合性; 另一方面, 在特殊的应用环境下, 负载运输过程还会受到水
流作用力的影响. 海水作用力的存在也使系统各状态量间耦合关系更为复杂. 因此, 深海起
重机系统依然存在许多悬而未决的控制难题.
近年来, 轨迹规划
[19-22]
方法成为解决欠驱动系统控制问题的常用方法, 用轨迹规划解决
起重机控制问题
[23-24]
也逐渐一般化, 此类方法可看作从系统输入到输出的一种解, 通过考虑
具体的控制目标, 将已知参数与期望轨迹作为系统输入, 并将可驱动状态量(如桥式起重机
的台车位移、速度、加速度)的时间序列作为系统输出. 根据实际需求, 规划所得轨迹可对
系统能耗、运输效率等指标进行优化, 同时还能够保证吊运的平稳性和准确性. 迄今为止,
研究人员针对陆地起重机系统(陆地桥式起重机、塔式起重机)提出了基于轨迹规划与跟踪
的控制方法. 具体而言, 对双摆起重机系统, 陈鹤等
[25]
结合高斯伪谱法, 将双摆吊车的控制
问题转化为函数的优化问题, 提出了一种时间最优的消摆轨迹规划方法; Sun 等
[26]
设计了一
种能量最优的轨迹规划方法, 可在整个运输过程中保证台车精确定位, 降低系统的能量能
耗, 并有效抑制负载的残余摆动; Boscario 等
[27]
提出了一种轨迹规划算法, 可增强轨迹对系
统参数的鲁棒性, 有效抑制负载的残余摆动; Zhang 等
[28]
提出了一种适用于非零初始负载摆
角的误差跟踪控制方法. 对塔式起重机系统, Liu 等
[29]
为起重臂和台车规划了一条轨迹, 此
轨迹不仅能实现有效载荷的运输, 还可改善系统的瞬态性能.
然而, 上述现有的针对陆地起重机系统的轨迹规划方法均需离线进行, 无法很好地实
现对系统的实时规划/控制, 因此, 在一些对实时性要求较高的场合, 现有离线规划方法便不
再适用. 以桥式起重机系统为例, 当台车目标位置发生变化时, 需重新离线计算轨迹, 使作
业效率受到影响. 为满足实时性要求, 一些学者进一步针对陆地起重机系统提出了基于在线
轨迹规划的控制方法. 具体而言, 对桥式起重机系统, Otto 等
[30]
提出了一种基于伺服约束的
实时轨迹控制方法, 并通过理论分析与实际实验证明了该方法的实时性和鲁棒性; 通过对台
车运动过程离散化, Li 等
[31]
提出了一种基于载荷摆动能量的在线规划方法, 可最小化台车的
运行时间.

剩余18页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4433
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


