

随着自动化技术的不断发展, 自动驾驶已成为未来交通发展的趋势
[1-3]
, 根
据美国汽车工程师学会(Society of Automotive Engineers, SAE)制定的分级
标准, 将车辆的自动驾驶分为 6 级: 无智能化(L0); 驾驶辅助(L1); 部分自动
驾驶(L2); 有条件的自动驾驶(L3); 高度自动驾驶(L4); 全自动驾驶(L5). 在
L4 级以上自动驾驶环境下, 车辆与车辆、车辆与路边设施之间能实现双向的信
息交互, 可以突破已有经典的基于周期、绿信比、相位差的交通流管控方式,
车辆之间能相互协调与合作地通过交叉口, 而无需信号灯控制
[4-5]
. 在自动驾驶
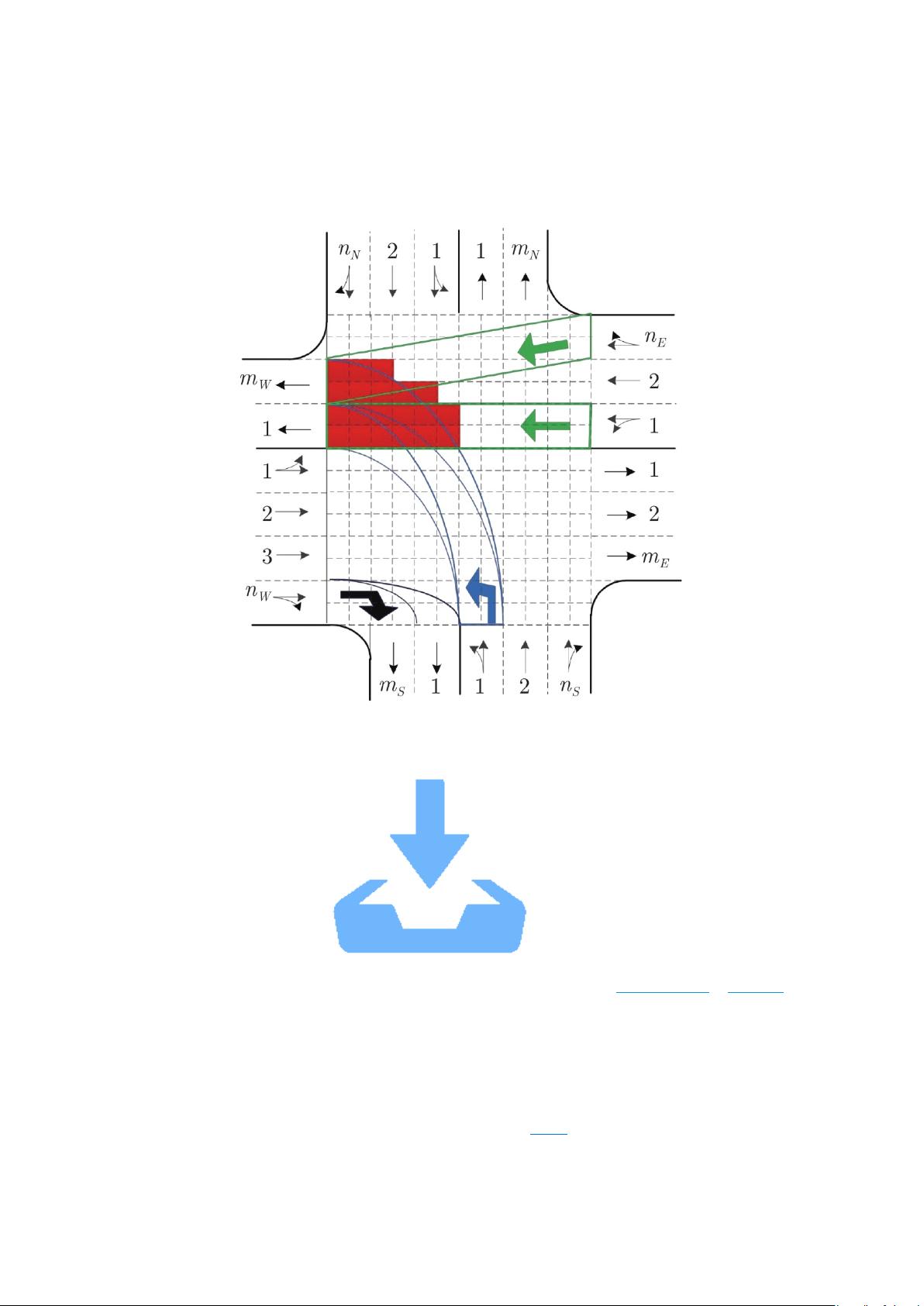
环境下, 交叉口交通控制的对象将直接面向车辆, 每台车辆拥有其唯一的通行
方案, 不同行驶方向的车辆可以同时相互穿插地通过交叉口, 这种基于自动驾
驶的新型控制的优势在于, 道路的通行能力能得到更充分的利用. 控制的难点
在于: 如何使用时间分离和空间分离的方法, 在能够协调不同车辆间交通冲突
的条件下, 使到达车辆的总效益最大. 基于上述分析, 如何设计面向自动驾驶
车辆的交叉口管控方法(Autonomous intersection control, AIC)已成为近年
来的研究热点之一
[6-8]
.
Dresner 等
[9-10]
于 2004 年和 2008 年提出了早期的 AIC 模型, 所有自动驾驶
车辆根据到达交叉口的时间次序, 依次请求交叉口的通行权, 如果车辆在交叉
口的通过路径上, 与更早到达的车辆冲突, 则需等待, 否则能顺利通行, 通过
与信号控制对比, 证明了其模型的有效性. 其模型基于先到先服务的交叉口控
制策略(First come first served, FCFS), 在大多数情况下, FCFS 被证明可
以降低延误
[11-13]
. 但是, Levin 等
[14]
指出在过饱和、列队行驶等情况下, FCFS
策略的延误比信号控制更大.
因此, 近年来国内外研究学者对如何提高 AIC 的效率的问题,展开了较多的
研究. Li 等
[15]
基于安全驾驶模式, 使用生成树(Spanning tree)模型, 建立了
4 种算法规划自动驾驶车辆在交叉口区域的行车轨迹. Ahmane 等
[16]
使用 Petri
网对自动驾驶交叉口控制策略进行建模, 并与先到先服务策略进行了对比, 验
证了模型效益. Carlino 等
[17]
根据不同出行者之间时间价值的不同, 考虑驾驶
员特性、与目的地的距离等因素, 建立了自动驾驶车辆通过交叉口的竞价模型,
最后对竞价造成的社会公平性问题进行了探讨. 此外, 区别于集中式的自动驾
驶交叉口管控模式, 使用博弈论(Game theory)方法研究分布式的自动驾驶交叉
口的自组织模型也成为目前研究的重要方向
[18-19]
.
针对自动驾驶交叉口控制可能造成的组合爆炸问题
[20]
, Wu 等
[20]
使用蚁群算
法对 AIC 问题进行优化, 并借助机器人实物模型验证了算法的有效性. Li 等
[21]
使用了遗传算法搜寻控制模型的最优解. 此外, 基于车队优化和基于冲突点优
化的 AIC 模型也相继被提出. Bashiri 等
[22]
提出以自动驾驶车队为研究对象,
考虑车队中的车辆数、车队长度和车队等待时间, 调节 AIC 系统的整体效益.
Medina 等
[23]
提出了基于虚拟车队(Virtual platooning)的 AIC 方法, 能将不同
车道不同方向的车辆进行组队控制. 基于冲突点优化方面, Lee 等
[24]
借助航空


剩余29页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4436
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


