
1. 引言
在自适应滤波算法中,以最小均方误差为代价函数的最小均方算法(Least Mean
Square, LMS),在高斯噪声环境中因其简单性和鲁棒性强得到了广泛的研究和应用
[1]
。然
而,在实际应用中,如:语音处理、信号处理、电力通信和水声信道中,系统往往受到非
高斯噪声的干扰。已有研究表明,近海水声信道中的非高斯噪声多以带有前鳌的鳌虾类生
物产生的噪声为主,其表现出强烈的脉冲特性
[2]
。由于 LMS 算法只考虑了数据的 2 阶统计
量,在非高斯噪声下,如脉冲噪声,LMS 算法收敛速度和稳定性显著下降
[3]
。为克服这个
问题,Shao 和 Nikias
[4]
提出了最小平均 p 范数(Least Mean p-Power, LMP)算法,以误差的 p
次方代替误差的平方。LMP 算法因其对脉冲噪声具有鲁棒性而备受关注,已被广泛应用于
多种场景,如系统辨识、回声消除、语音预测等多个领域。
传统 LMP 算法的步长为固定值,不能同时满足较快的收敛速度和较低的稳态误差的
要求,变步长是解决算法收敛速度和稳态误差的有效方法
[5]
。为改善固定步长 LMP 算法性
能,相关研究人员开展了大量研究。付柏成等人
[6]
采用误差的 P 阶互相关加权平均值来更
新步长,提出了一种新的变步长归一化 LMP 算法,该变步长方法使算法收敛更加平稳,
同时加快了算法的收敛速度。为进一步提高脉冲噪声下 LMP 算法性能,郝燕玲等人
[7]
提出
一种基于梯度加权平均的变步长归一化最小平均 p 范数(Variable Step-Size-Normalized LMP,
VSS-NLMP)算法,该算法利用平滑梯度矢量控制步长的变化,提高了算法收敛速度和稳态
精度。为提高稀疏系统下 LMP 算法性能,陈思佳等人
[8]
将加权零吸引思想引入到 LMP 算
法中,并基于无噪先验误差提出了变步长零吸引最小平均 p 范数(Improved Variable Step-
Size Reweighted Zero Attracting-LMP, IVSS-RZA-LMP)算法。上述提出的变步长算法能够同
时获得较快的收敛速度和较低的稳态误差,与固定步长 LMP 算法相比性能有所提高,但
这些算法构造的变步长函数均未考虑脉冲噪声对于步长改变的影响。
结合上述分析,本文提出一种对脉冲噪声具有鲁棒性的变步长 LMP(Variable Step-Size
LMP, VSS-LMP)自适应滤波算法,对变形高斯函数
[9]
进行改进,将改进的变形高斯函数用
于步长的更新中。本文分析了算法的收敛性和参数对算法性能的影响,并通过仿真实验证
明了 VSS-LMP 算法具有更快的收敛速度和更强的系统跟踪能力。
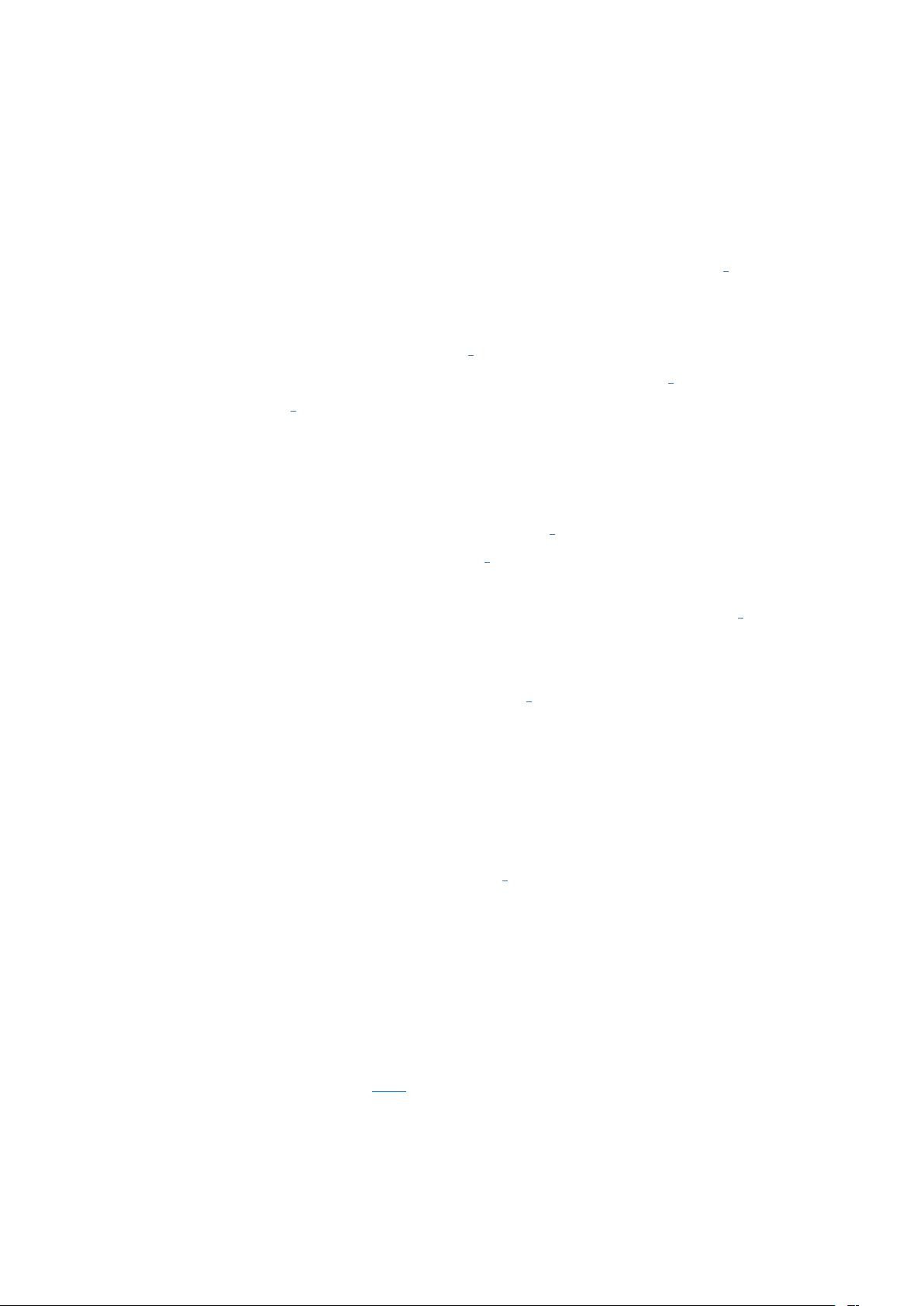
2. 最小平均 p 范数算法
自适应滤波器的原理框架如图 1 所示,输入信号$ {oldsymbol{x}}(n) $经过未知系统
$ {{oldsymbol{w}}_0} $与噪声信号$ v(n) $叠加得到期望信号$ d(n) $,
$ {oldsymbol{x}}(n) $经过自适应滤波器得到输出信号$ y(n) $。自适应滤波器通过期望信
号$ d(n) $与输出信号$ y(n) $相减得到误差信号$ e(n) $来调节滤波器权值向量
剩余17页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4513
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- PMP备考常见传统敏捷术语表 PMP备考必备 PMP术语
- 大数据实验2和6数据和python源代码.7z
- 全面解析:JavaScript语言核心技术及应用领域教程
- Java-wms基于JAVA的智能仓储管理系统, 包含PDA端和WEB端, 功能涵盖WMS(仓库管理系统), OMS(订单管理系统), BMS(财务管理系统), TMS(运输管理系统)
- MATLAB环境下基于隐马尔可夫模型-高斯混合模型-期望最大化的图像分割算法 算法运行环境为MATLAB R2021b,使用期望最大化(EM)算法进行图像分割,并同时依赖于高斯混合模型(GMM)和马尔
- 00大数据期末复习资料.7z
- 欧姆龙PLC程序欧姆龙案例欧姆龙标准程序 本产品适用于新手或者需要学习欧姆龙脉冲控制的新手 本程序包括有欧姆龙CP1H脉冲程序案例,威纶通触摸屏程序,word讲义 程序涉及方面广,适合新手入门学习
- aLinux(大三嵌入式).7z
- WebSocket协议:高效实现现代Web应用的实时通信解决方案
- 软件工程实验提交要求.zip
- 基于Javamail的邮件收发系统(系统+论文+开题报告+任务书+外文翻译+文献综述+答辩PPT).zip
- Hive函数应用实例解析:提升数据分析效率
- 软件工程PDF、思维导图、用例图、类图.7z
- 0软件工程期中、期末考.7z
- 通过FTP上传文件到一个或者多个CDN资源
- 宠物的每一帧,请务必和代码放在同一路径下再运行
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


