数据新鲜度驱动的协作式无人机联邦学习智能决策优化研究.docx
版权申诉
66 浏览量
2023-02-23
20:06:45
上传
评论
收藏 423KB DOCX 举报

1. 引言
在传统计算范式中,用户设备通常将原始数据上传至集中云服务器进行处理,但是这
不可避免地造成极大的传输开销和数据隐私泄露。针对该问题,联合利用移动边缘计算
(Mobile Edge Computing, MEC)
[1]
和联邦学习
[2]
设计解决方案逐渐成为研究焦点。一方面,
边缘服务器分担用户设备的联邦学习本地训练任务,既减轻用户设备的计算负载,又降低
向云端传输数据造成的开销;另一方面,利用本地化模型训练结果聚合成全局共享模型,
避免了隐私数据泄露的弊端,有利于实现快速、高效的训练过程。然而,边缘服务器通常
是位置固定的且覆盖范围有限的,这将导致其无法灵活有效地处理复杂变化的强实时性任
务
[3]
。
随着下一代网络系统如 6G 通信网络的快速发展,高性能无人机(Unmanned Aerial
Vehicle, UAV)已被视为具备感知、计算和存储能力的空中边缘服务器
[4]
。与传统的安装在
地面基站上的固定边缘服务器相比,无人机利用其高度敏捷性、灵活性和移动性实现按需
部署,增强了系统的覆盖范围
[5]
。在许多强实时性应用场景(如交通管理、环境和灾难监
测、战场监视等
[6]
)中,多个无人机在不同区域中移动,及时接收众多分散的用户数据,以
协作的方式完成复杂的移动边缘计算任务,训练具有高可用性和高实时性的机器学习模型
(例如,图像分类模型)
[7]
。进一步地,在联邦学习模式下,多无人机完成训练后只需要将本
地模型参数上传至云服务器进行全局模型聚合,实现训练模型的共享和隐私保护。
值得注意的是,无人机的感知半径有限,且有限的机载电池会约束无人机的移动范
围,因此无法保证每个用户设备产生的数据都能及时地被无人机接收并处理。而在移动边
缘计算场景中,数据的实时处理对其可用性和模型的实时更新非常重要。为此,文献[8]在
模型中采用数据的信息年龄(Age-of-Information, AoI) 来刻画数据的新鲜程度,将其定义为
数据最近一次成功传输后经过的时间
[9]
。但是,它们忽略了数据在区域中等待的时间,这
对 MEC 场景中无人机的模型训练和通信决策是至关重要的,特别是在多无人机协作训练
的情况下。本文将数据的新鲜程度,即数据在端设备上等待的时间与被无人机接收并处理
的时间之和定义为数据的信息年龄
[10]
,通过最小化信息年龄来优化无人机移动边缘计算决
策,提升联邦学习性能,增强数据处理实时性。因此,如何规划无人机的路径和制定通信
决策,以及如何在无人机之间展开协同工作,合理地分配计算资源,同时满足能耗和时延
的限制,成为本文需要解决的关键问题。
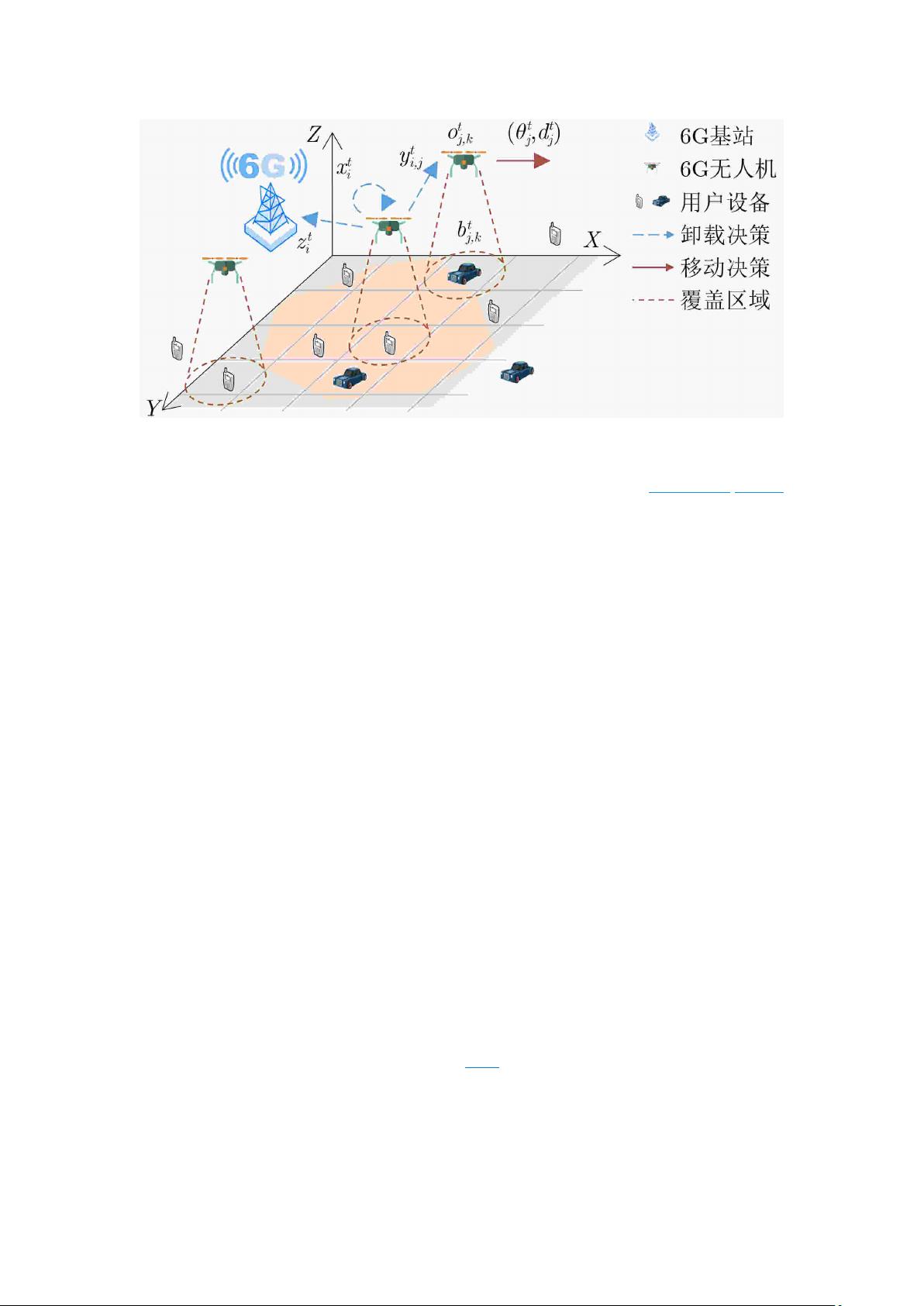
针对上述挑战,本文提出了一种崭新的基于数据新鲜程度的协作式无人机联邦学习范
式,通过多无人机协同地智能地进行移动、通信和计算卸载决策,高效地完成了边缘数据
处理任务,显著地降低了无人机的能量消耗并保证了模型高准确率和低数据信息年龄。本
文进一步提出一种多智能体深度强化学习(Deep Reinforcement Learning, DRL)算法,有效地

剩余14页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4036
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











