基于联盟图博弈的地下空间无人机应急通信网络拓扑控制算法.docx
版权申诉

1. 引言
近年来,地下大型综合体、地铁、矿井等地下空间规模化开发利用造成了地下空间灾
害事故频发。当塌陷、火灾、矿井冲击地压等地下空间灾害事故发生时,首要的任务就是
实时获取灾情信息并建立临时通信网络,为后续的救援工作提供支撑。我国地下空间事故
应急救援体系尚未建立健全,导致地下空间应急救援网络的研究工作相对滞后
[1]
。轻小
型、高负载、高续航无人机(Unmanned Aerial Vehicle, UAV) 技术的突破,使得 UAV 在地
下空间应急救援的应用成为可能。空天地一体化网络是 6G 的核心方向之一,现有关于 6G
潜在关键技术的预研工作中,明确将灾后应急救援作为 6G 空天地一体化网络的主要应用
场景
[2,3]
。
UAV 网络作为空天地一体化网络的重要组成部分,可在地下空间突发灾害事故应急
救援的“探、搜、救”不同阶段发挥关键作用
[4]
。2018 年,应急管理部发布《应急管理信息
化发展战略规划框架》,要求整合 UAV 等空基网络资源,实现对地下空间等灾害事故易
发、多发、频发区域全方位、立体化、无盲区的灾情监测与通信覆盖
[5]
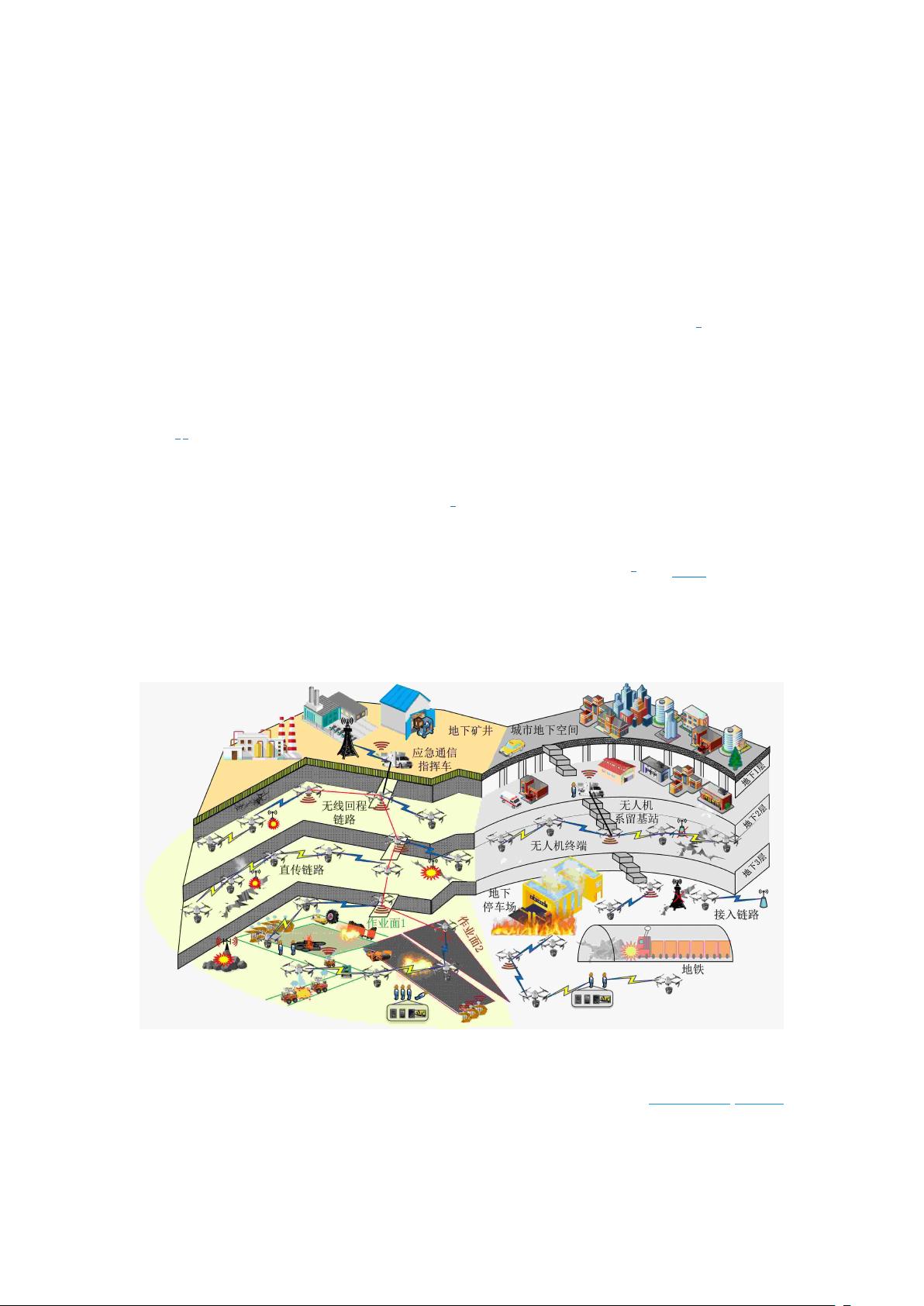
。如图 1 所示,应
急指挥中心在灾情探测阶段对灾情进行推演预判后,派遣全地形可移动的 UAV 集群深入
地下空间对可疑目标点进行协同搜索,携带不同类型传感与通信设备的 UAV 终端共同形
成 UAV 应急通信网络,为后续的灾害救援工作提供支撑。
图 1 地下空间灾后 UAV 应急通信网络
下载: 全尺寸图片 幻灯片
与传统的地面自组织网络或智能化自主网络相比,其相同之处在于地下空间无人机应
急通信网络同样需要分布式自组织的决策能力作为实现地下空间无人机集群拓扑控制的基


剩余14页未读,继续阅读
资源评论

 shipeng00002024-02-26这个资源内容超赞,对我来说很有价值,很实用,感谢大佬分享~
shipeng00002024-02-26这个资源内容超赞,对我来说很有价值,很实用,感谢大佬分享~

罗伯特之技术屋
- 粉丝: 3543
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











