

1. 引言
高分辨率遥感影像目标检测技术对人们提炼地表有用信息,充分发挥遥感数据效用具
有重要的研究意义和实际应用价值
[1]
。近年来,以卷积神经网络(Convolutional Neural
Network, CNN)为代表的深度学习方法,在高分辨率遥感影像目标检测中表现出优良的性能
[2]
。
基于深度学习的目标检测方法大致分为两类
[3]
,一是以 R-CNN, Fast R-CNN, Faster R-
CNN 为代表基于区域生成的二阶段方法,二是以 YOLO, SSD 为代表基于回归的一阶段方
法。遥感影像具有背景复杂,目标分布密集、方向多变且尺度差异的特点,需要根据这些
特点改进深度网络以完成遥感影像目标检测任务。Wang 等人
[4]
提出了一种端到端多尺度视
觉注意网络,通过关注目标区域的细节信息,改善了遥感影像背景复杂、目标分布密集的
问题。Cheng 等人
[1]
基于 R-CNN 提出了旋转不变的 CNN 模型,训练网络学习到具有旋转
鲁棒性的特征。在我们已有的研究工作中
[5]
提出了一种多尺度特征融合检测网络(Feature
fusion and Scaling-based Single Shot Detector, FS-SSD)用于无人机影像的小目标检测,通过
加入反卷积层和平均池化层组成特征金字塔,经过特征融合完成多尺度特征预测。此外,
我们还提出一种联合通道注意力和旋转不变深度特征的高分辨率遥感影像多尺度目标检测
方法
[6]
,在 FS-SSD 基础上加入通道注意力和方向响应卷积,获得旋转不变性的深度特征。
高分辨率遥感影像中地物目标和所处场景类别息息相关
[7]
,而现有的检测方法较少考
虑场景-目标的关联关系和总体认知关系,因而检测性能仍有提升空间。已有一些学者利用
场景和目标的上下文关系改善目标检测性能,如 Liu 等人
[8]
通过融合场景和物体之间关系
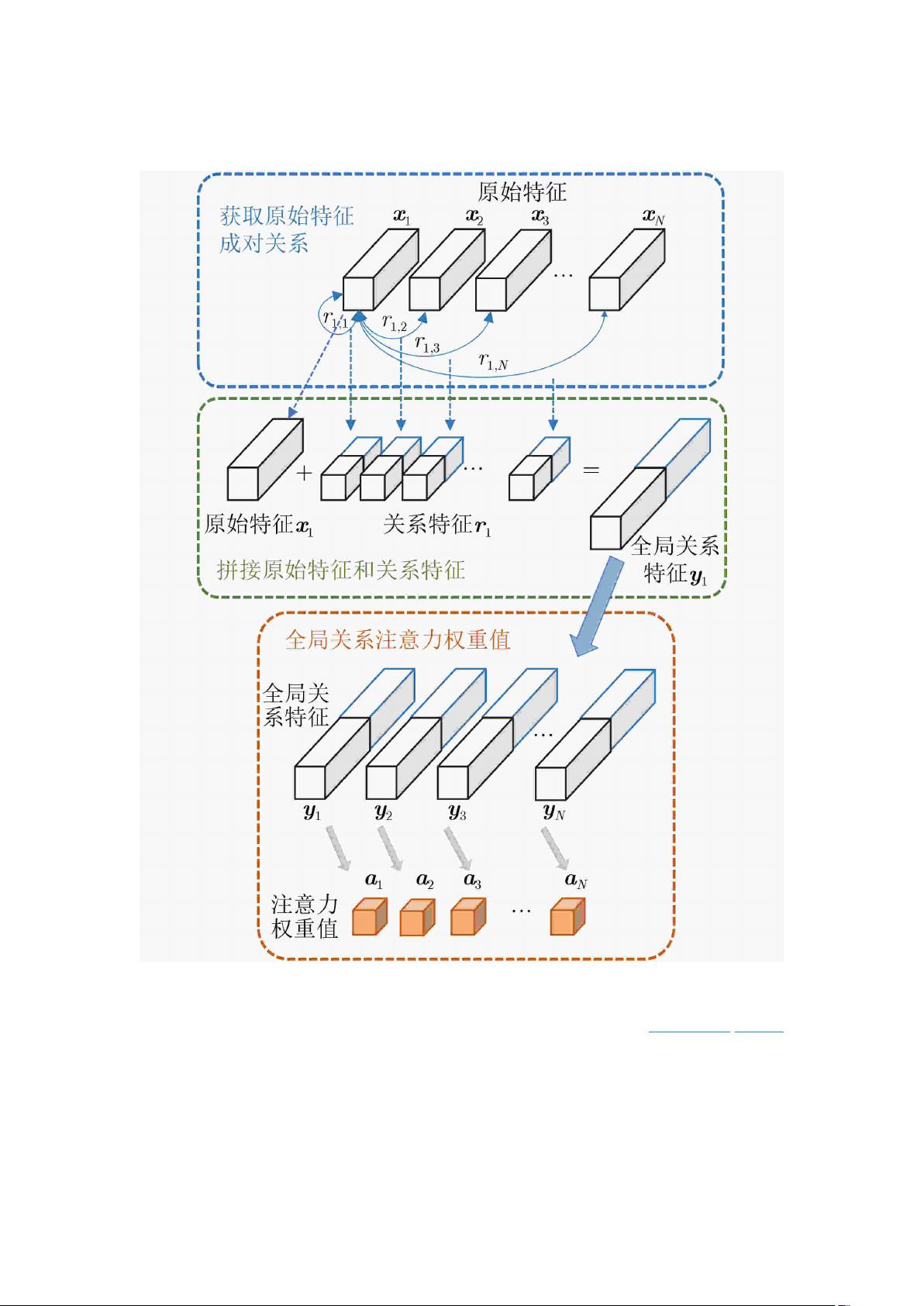
信息提出了结构推理网络,在提升目标检测任务的性能上发挥了很大作用。Zhang 等人
[9]
提
出全局关系注意力模块(RGA),通过充分利用图像中的全局结构信息,来获得特征的注意
力权重,在行人再识别中取得了优异性能。这些研究结果表明,借助场景信息可以有效提
高目标检测性能。
为此,本文提出全局关系引导场景约束的高分辨率遥感影像目标检测方法。主要贡献
如下:
(1) 与现有的高分辨率遥感影像目标检测方法不同,提出利用全局关系注意力学习全
局场景特征作为约束,通过建立场景信息和地物目标的关联关系指导目标检测任务。
(2) 在场景约束条件下,利用方向响应卷积模块和多尺度特征模块,生成兼具旋转不
变和多尺度的目标特性信息,实现更准确的目标定位和分类。
(3) 通过交叉熵分类损失和定位损失的加权和联合优化目标检测网络,达到更优的预
测性能。

剩余12页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4558
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 【微信小程序源码】京东首页demo
- 《大闹天宫》动画美术风格中的中国传统元素分析_张星辉.caj
- VCU Simulink需求与功能开发文档:集成档位控制、ON Start启动、上下电管理、扭矩调控、能量优化与滑行回收的全方位控制系统需求说明,VCU Simulink需求与功能开发文档:集成档位控
- 基于COMSOL Multiphysics的三维岩石酸化过程模拟:探讨酸液在碳酸盐岩储层中的流动、传质与反应机制,利用COMSOL Multiphysics模拟三维岩石酸化过程:探讨酸液在碳酸盐岩储层
- 台达DVP PLC与西门子V20变频器通讯程序:可靠控制,自动化调整,接线与设置指南,台达DVP PLC与西门子V20变频器通讯程序:可靠控制,自动化调整,接线与设置指南,台达DVP PLC与3台西门
- 基于Python的Django-vue基于大数据的学习资源推送系统实现源码-说明文档-演示视频.zip
- PHP API 客户端,可让您与 deepseek API 进行交互 deepseek-php-client-2.0.3
- 【微信小程序源码】和茶网
- 自然启发MPPT优化技术,霜冰优化算法RIME在MPPT中对光伏局部遮阴情况的性能提升研究,霜冰算法RIME优化mppt,光伏mppt , 局部遮阴光伏mppt 2023年,H Su等人受到自然界霜冰
- 使用 PHP Deepseek 实现问答 ask-deepseek
- COMSOL Multiphysics中的comsol支架静态分析:基本原理、操作与结果分析,COMSOL Multiphysics中的comsol支架静态分析:基本原理、操作与结果分析,comsol
- 基于Python的Django-vue基于大数据的银行信用卡用户的数仓系统源码-说明文档-演示视频.zip
- 翱捷功能机常见空间问题的解决
- 西门子博途1500双驱同步编程实例分享,结构化编程、伺服同步运行、多用户权限登录,开发者必备的学习参考(版本v16),西门子博途V16全新双驱同步与三轴码垛程序:结构化编程框架,多用户权限控制,高值学
- DotSpatial库学习
- Delphi 12.5 控件之delphi实现腾讯签名算算法源代码.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


