基于反馈线性化的AUV三维轨迹跟踪滑模控制.docx
版权申诉
94 浏览量
2023-02-23
19:59:44
上传
评论 1
收藏 1.99MB DOCX 举报

自主式水下航行器(autonomous underwater vehicle, AUV)凭借自身的安全性以及经济性
成为海洋勘测、港口侦察等任务的重要工具,AUV 的航迹准确跟踪控制能力是执行这些任务的
技术基础。
AUV 三维轨迹跟踪控制一直是研究的热点,传统的非线性控制方法有反步控制
[1-3]
、滑模
控制
[4]
、自适应控制
[5]
等。文献[6]提出了双环无抖积分滑模控制方法,大大简化了滑模控制器的
设计方法,但由于引入了积分的环节,很容易造成误差积分饱和的问题。文献[7]针对直接跟踪
期望位置姿态超调过大的问题,提出了双闭环终端滑模控制方法,外环经位姿反馈量获得虚拟
控制量实现对位姿误差的镇定,内环跟踪虚拟控制率实现对速度误差的镇定。文献[8]针对参数
摄动和海流干扰下 AUV 平面目标跟踪的问题,提出了模糊自适应轨迹跟踪控制器,仿真实验
中可以看出模糊自适应算法仍会给控制系统带来误差。文献[9]采用状态反馈线性化方法对 AUV
数学模型进行线性化,降低其非线性程度。文献[10]潜航器以非线性耦合模型作为控制对象,
构建基于精确反馈线性化的潜航器编队协调控制系统,由于采用协调控制器相对简单,整个控
制系统的收敛速度较慢。文献[11]采用了边界层自适应终端滑模的控制方法来抑制滑模控制带
来的系统抖振的问题。文献[12]针对在有界未知扰动下的欠驱动 AUV 水平面轨迹跟踪控制问
题,设计了基于积分滑模的轨迹跟踪控制器,极大提高了控制器在有界干扰下的鲁棒性,但文
中对未知干扰的抑制并未提出有效的解决方法。
综上分析可知 AUV 在复杂海洋环境下的精准三维轨迹控制仍存在诸多挑战,本文对全驱
动 AUV 模型进行反馈线性化,考虑在定常海流以及未知环境的干扰下,对线性化后的模型设
计自适应可变参滑模的控制器,并引入比例积分观测器,实现 AUV 在未知复杂环境中的精准
无抖振三维轨迹跟踪控制。
1. AUV 模型
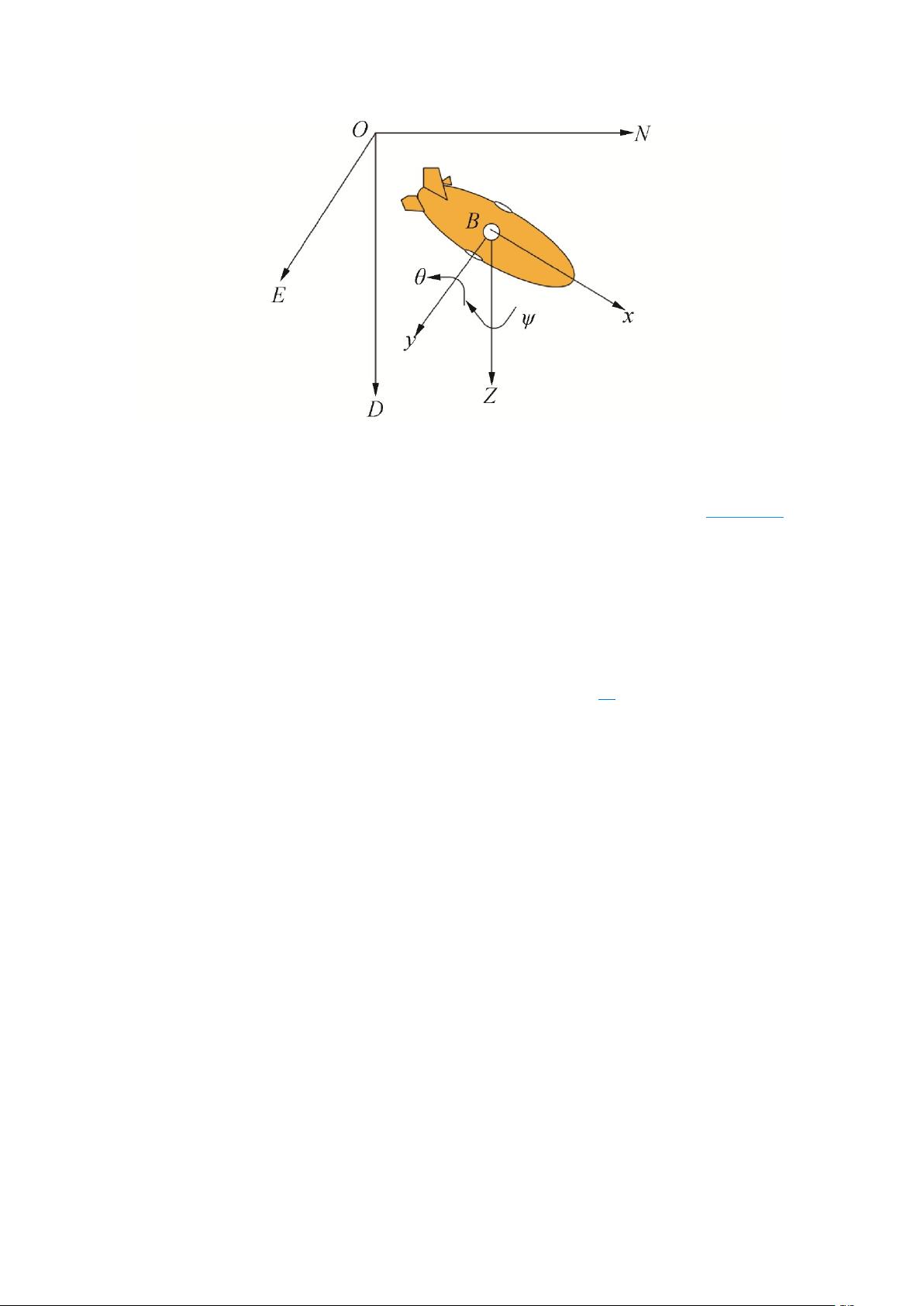
图 1 中 O-NED 为北东坐标系即固定坐标系,B-xyz 为船体坐标系即惯性坐标系。AUV 的
执行机构配置为:主推进器在 AUV 的艉部布置,实现 AUV 纵向速度控制;辅助推进器在 AUV
的两侧和顶部对称布置,实现 AUV 横向速度和垂向速度控制;垂直舵实现 AUV 艏向角控制;
水平舵实现 AUV 纵倾角控制。AUV 的空间运动具有全驱动的特性,空间运动坐标系如图 1 所
示,并在船体坐标系下建立的数学模型可表示为:
⎧⎩⎨⎪⎪⎪⎪oldsymbolη˙=oldsymbolJ(oldsymbolη)oldsymbolμoldsymbolMoldsymbolμ˙=\boldsymbolg′oldsymbolτ−\boldsymbolC(\boldsymbolμ)oldsymbolμ−\boldsymbolD(oldsymbolμ)oldsymbolμ−g(\boldsymbolη){oldsymbolη˙=oldsymbolJ(oldsymbolη)oldsymbolμoldsymbolMoldsymbolμ˙=ol
dsymbolg′oldsymbolτ−oldsymbolC(oldsymbolμ)oldsymbolμ−\boldsymbolD(\boldsymbolμ)oldsymbolμ−g(oldsymbolη)
(1)
剩余14页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3654
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- keil2 + proteus + 8051.exe
- 1961ee27df03bd4595d28e24b00dde4e_744c805f7e4fb4d40fa3f695bfbab035_8(1).c
- mediapipe-0.9.0.1-cp37-cp37m-win-amd64.whl.zip
- windows注册表编辑工具
- mediapipe-0.9.0.1-cp37-cp37m-win-amd64.whl.zip
- 校园通行码预约管理系统20240522075502
- 车类型数据集6250张VOC+YOLO格式.zip
- The PyTorch implementation of STGCN.STGCN-main.zip
- 092300108.cpp
- 车类型数据集6000张VOC+YOLO格式.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


