基于兴趣倾向机制的仿生SLAM算法.docx
版权申诉
87 浏览量
2023-02-23
20:00:00
上传
评论
收藏 1.23MB DOCX 举报


1. 引言
同时定位与地图创建(Simultaneous Location And Mapping, SLAM)是指在没有环境先验
信息的情况下,使用自身携带的多种传感器采集环境信息,于运动过程中建立环境模型,
并同时估计机器人自身运动。但 SLAM 存在计算量较大、复杂度较高等问题,SLAM 的智
能化水平相比于动物的导航能力较低。为此开发和研究新的 SLAM 算法,特别是借鉴鼠脑
海马认知机理的方法,是近年来移动机器人 SLAM 领域的一个研究方向和重点
[1-3]
。
神经学家研究发现动物大脑中的海马体在导航中起着关键作用,海马体能够实现“空
间认知地图”的构建,并在路径整合中发挥重要作用
[4,5]
。文献[6]表明哺乳动物海马体内的
位置细胞和内嗅皮层的网格细胞能够对环境形成类似地图的空间表示,并把这种空间表示
称为一种能够表示拓扑关系的认知地图。Hafting 等人
[7]
确定了路径整合器在大脑结构中的
具体位置,其有力证据是在脑背侧内嗅皮层中发现一种在空间特定位置具有放电特性的网
格细胞,当动物到达特定的位置点时该细胞总是被激活。Doeller 等人
[8]
发表在 Nature 上的
文章中也证实了人脑中网格细胞的存在。研究者认为网格细胞是动物空间导航的重要组成
部分,近年来经过大量动物导航相关实验的研究,发现哺乳动物大脑海马中,参与构建“空
间认知地图”相关性的细胞除了网格细胞外还有位置细胞
[9]
、边界细胞
[10]
、条纹细胞
[11]
等。
研究人员根据这些细胞的特性设计多种数学模型,Barry 等人
[12]
根据网格细胞的六边形放
电结构提出振荡干涉模型对网格细胞进行建模,对速度信息和方向信息进行整合来获取大
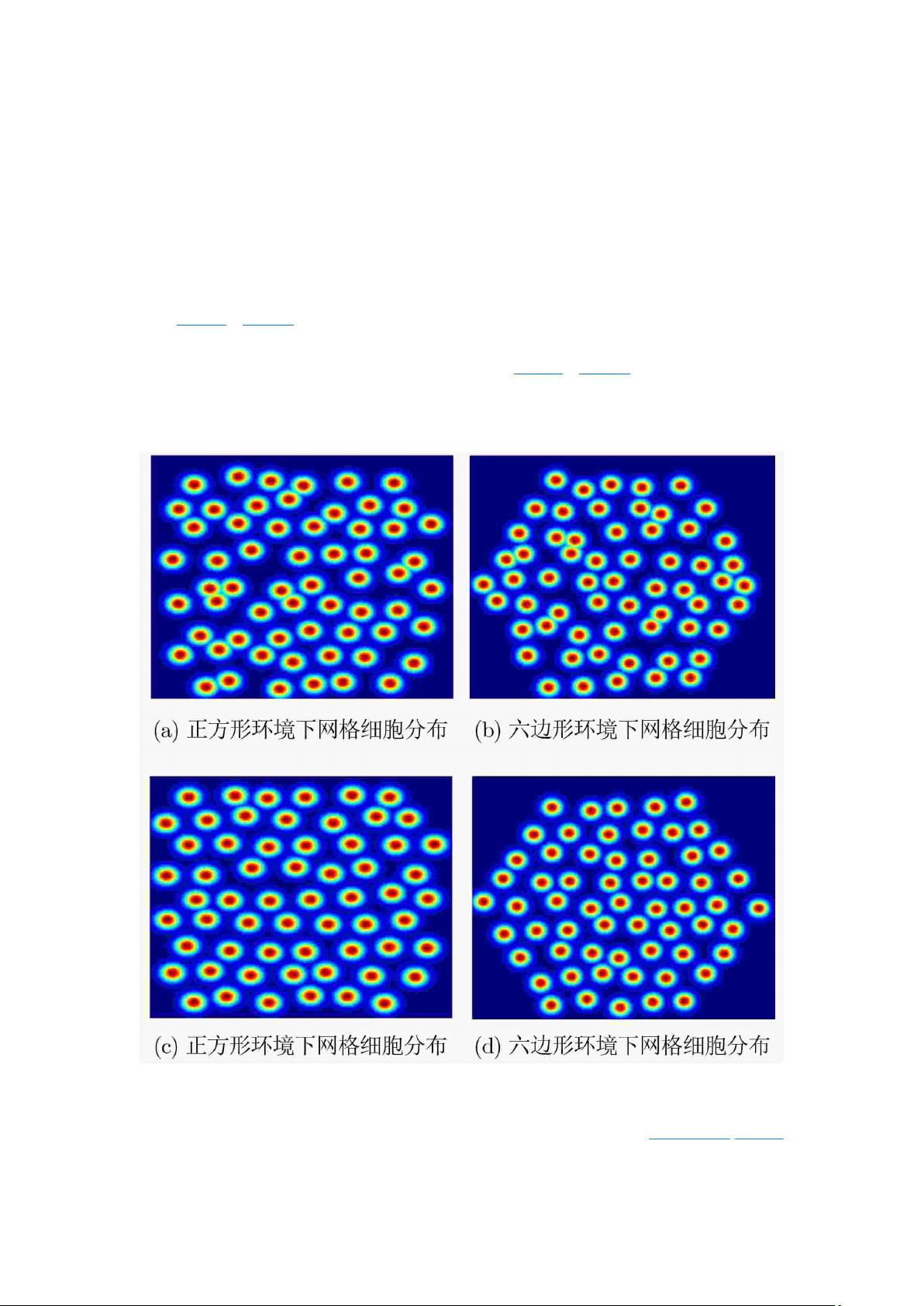
鼠在环境中的位置信息。但是缺乏生理学依据。Hardcastle 等人
[13]
发现在不同的几何环境
下网格细胞的分布规律会发生变化,在实验中将圆形环境换成六边形环境时网格细胞分布
会重新排列且定位精度也发生了较大的变化。Jayakumar 等人
[14]
针对不规则复杂环境场景
对网格细胞分布的影响,引入边界信息对网格野相位进行周期性重置,提高了算法的定位
精度。
随着学者探究发现,大鼠在进行导航时不仅仅依靠位置感知模型,还涉及外界的视觉
线索,为了将视觉线索与海马体计算模型相融合,文献[15]借鉴灵长类动物大脑的一些特
性,提取视觉信息并采用模糊自适应共振理论模型建立视觉记忆,实现对环境的认知与表
征,但该模型没有考虑众多神经元细胞之间的联系,鲁棒性较差。Milford 等人
[16]
提出基于
鼠类定位与构图的导航算法(Rat Simultaneous Location and Mapping, RatSLAM),算法利用
不同类型的定位细胞功能来完成空间导航任务。然而此算法实时性较低且受光照影响较
大。文献[17]为了提高 RatSLAM 算法实时性将 FAB-MAP 算法融入到 RatSLAM 中,改进
后的算法采用了视觉词袋模型来进行闭环检测提高了系统在复杂环境中导航的实时性。
Hou 等人
[18]
为了解决光照对环境的影响通过 PlaceCNN 网络提取图像的显著性区域进行闭
环检测,在复杂的光照情况下取得了较好的效果。李维鹏等人
[19]
针对闭环路径不一致、闭


剩余15页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3895
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











