分数阶PID扭矩控制在边驱耦合轻轨车辆的应用研究.docx
版权申诉
66 浏览量
2023-02-23
16:53:37
上传
评论
收藏 2.99MB DOCX 举报


为了解决日益拥堵的城市交通问题, 地铁、轻轨, 磁悬浮等城市轨道交通系统得到了
日新月异的发展. 相对于地铁成本高、周期长、抗灾害性差等缺点, 轻轨系统具有灵活便
捷、运量适中、美观环保等优势, 是一种有效的城市通勤方案
[1]
. 近年来, 欧美各大城市已
将轻轨系统作为城市交通的重要组成部分, 甚至很多城市将自己特有的轻轨车作为城市名
片进行宣传
[2,3]
, 而我国则将发展重点放在了地铁上, 轻轨交通的应用范围不广, 轻轨车辆的
研发力度不足.
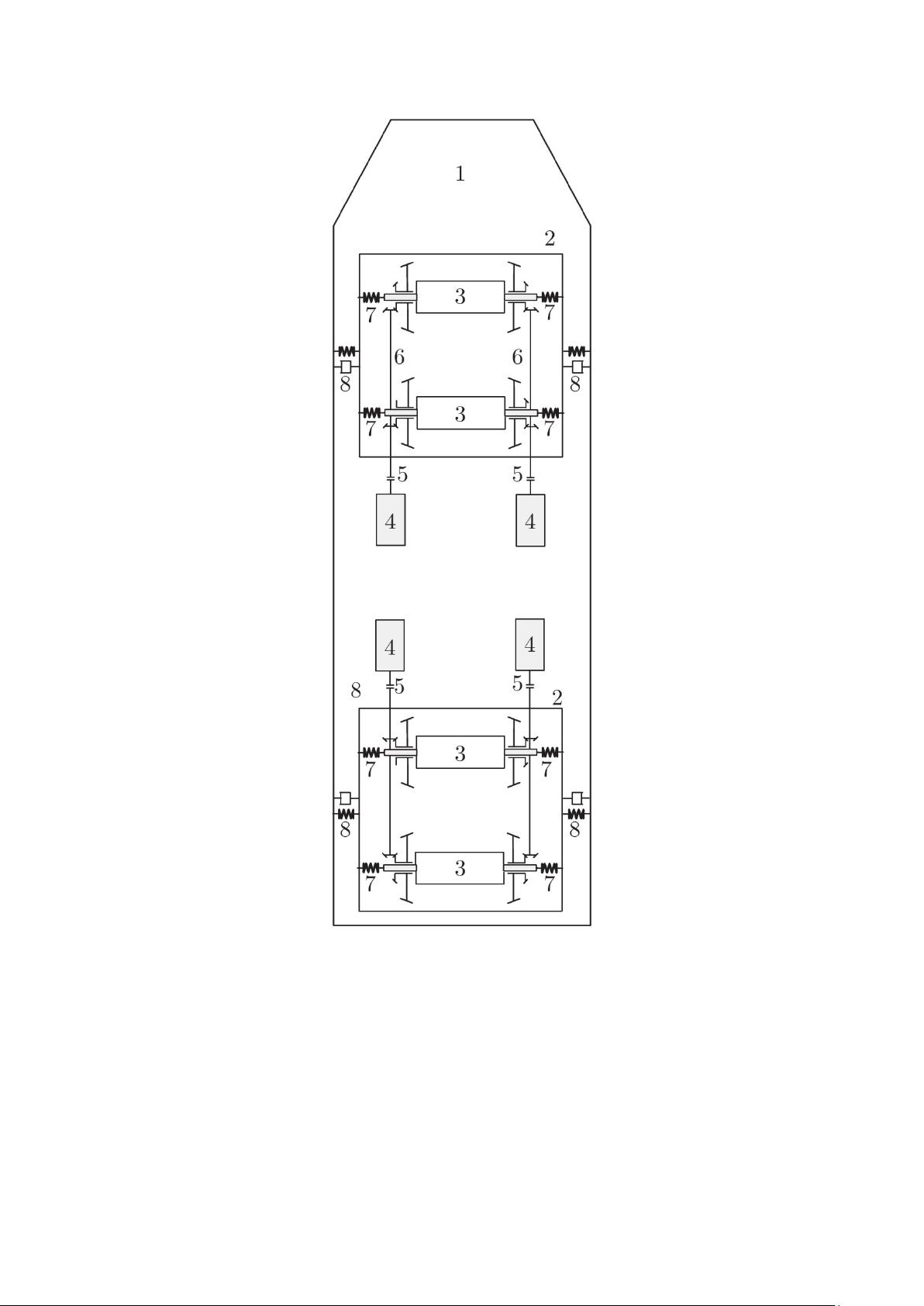
作为轻轨系统广泛采用的运输载体, 边驱耦合 100 %低地板轻轨车以其载客量大、曲
线通过性好、乘降便捷而备受青睐. 区别于传统的轮对系统, 100 %低地板车普遍采用独立
轮对(Independently rotating wheel, IRW), 以降低整车地板面高度
[4]
. 边驱耦合是独立轮对的
牵引特点, 即将左右两侧的前后两个车轮分别作为一个牵引单元, 由转向架两侧的电机提供
驱动扭矩
[5]
. 边驱耦合转向架的牵引形式及其特殊的动力学特性, 长期成为国内外学者研究
的焦点. 文献[6-10]探讨了独立旋转车轮的耦合方式及转向架的自对中与自导向能力. 文献
[11-12]建立了双轴独立轮对转向架的多体动力学模型, 指出独立轮对即使在直线上也会出
现轮缘连续接触的现象, 在轻轨车通过小半径曲线时该现象会更严重. 文献[13]基于独立轮
对的静态导向特征, 通过轮轨接触约束下的重心轨迹提出了一种新的车轮踏面设计方法, 根
据在 Simpack 下的动力学数值计算结果, 指出优化后的横向复原力可正比于横向位移. 文
献[14] 开展了时速 80 km/h 以上、通过最小曲线半径为 25 m 的低地板车辆转向架的设计
工作, 通过设计试验优化了主动导向所需的半主动悬挂参数, 将低地板车运行品质提高了约
7 %.
根据轮轨蠕滑理论
[15]
, 独立轮对在无牵引力的状态下是没有纵向蠕滑导向力的, 这将
导致车辆的曲线通过能力变差
[16]
. 近年来, 随着控制技术的发展, 国内外学者开始研究如何
通过控制牵引电机的输出扭矩来提高独立轮对的导向能力, 进而达到优化低地板车通过曲
线时动态性能的目的. 文献[17]针对低地板车通过小半径曲线的工况, 对横向位移复原力控
制开展了研究, 并在缩尺模型上验证了控制方法的可行性. 文献[18-19]以车轮相对转速、轨
道曲率以及轮对摇头角作为反馈信号, 同时采用了一种鲁棒主动导向控制器来提高独立轮
对的导向能力, 通过 Simpack 与 MATLAB 联合仿真, 验证了该控制器能够同时提高车辆的
运行性能, 并显著降低车辆在直线与曲线上的轮轨磨耗. 文献[20]指出, 独立轮对需要比传
统轮对响应更快、精度更高的牵引控制策略, 设计并建立了一种准半闭环的时隙结构模型,
进而提高转向架的复原扭矩控制性能. 文献[21-22]以轮毂永磁同步电机为研究对象, 基于左
右车轮的转速差反馈, 研究了独立旋转车轮的扭矩脉动效应并得到了主动导向控制的边界
条件, 同时优化了车轮踏面. 文献[23]针对轻轨车辆普遍采用的内部永磁同步电机, 设计了
一种鲁棒控制策略, 并提出了一种开环测试方法以验证扭矩控制性能.
作为对可靠性要求极高的公共交通系统, 100 %低地板轻轨车适合采用技术最成熟、应
用最广泛的 PID 控制方法
[24]
. 分数阶微积分运算具有记忆特性, 且可使控制器设计方法更
加灵活, 将分数阶计算与控制器参数整定相结合, 是目前十分活跃的研究方向
[25-26]
. 本文尝
试将分数阶 PID 控制方法应用于 100 %低地板轻轨车的扭矩控制中, 并分析车辆在控制系
统作用下的动态特性.



剩余29页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3578
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











