

全源导航系统中传感器种类和数量繁多, 在进行导航时要使用多个传感器的数据来进
行组合导航. 如果传感器发生故障, 那么将会引起导航解算错误. 因此, 在进行导航解算前,
必须先对传感器进行故障检测.
故障检测方向一直有许多学者研究, 主要分为两种方法. 一种方法是建立对应的数学
模型, 根据系统状态量之间的关系来判断传感器是否发生故障. 如张绍杰等
[1]
、Avram 等
[2]
、汤文涛等
[3]
、Sadeghzadeh-Nokhodberiz 等
[4]
都是先建立系统的数学模型, 然后对系统的
误差特性进行分析, 进而实现故障诊断. 该方法比较复杂, 需要了解系统的工作原理, 但实
际中许多系统难以抽象出数学模型, 因此应用范围比较小.
另一种方法是基于人工智能方法, 其采用特征工程与机器学习方法或深度学习进行故
障诊断. Yan 等
[5]
、Swischuk 等
[6]
和郑晓飞等
[7]
先采用特征工程进行信息提取, 然后采用机器
学习方法进行识别; Jing 等
[8]
和 Guo 等
[9]
采用深度学习的方法对原始数据进行故障检测. 一
方面特征工程比较复杂; 另一方面这些方法都侧重于对单个传感器数据的故障诊断, 且难以
准确识别出间歇性故障和渐变性故障.
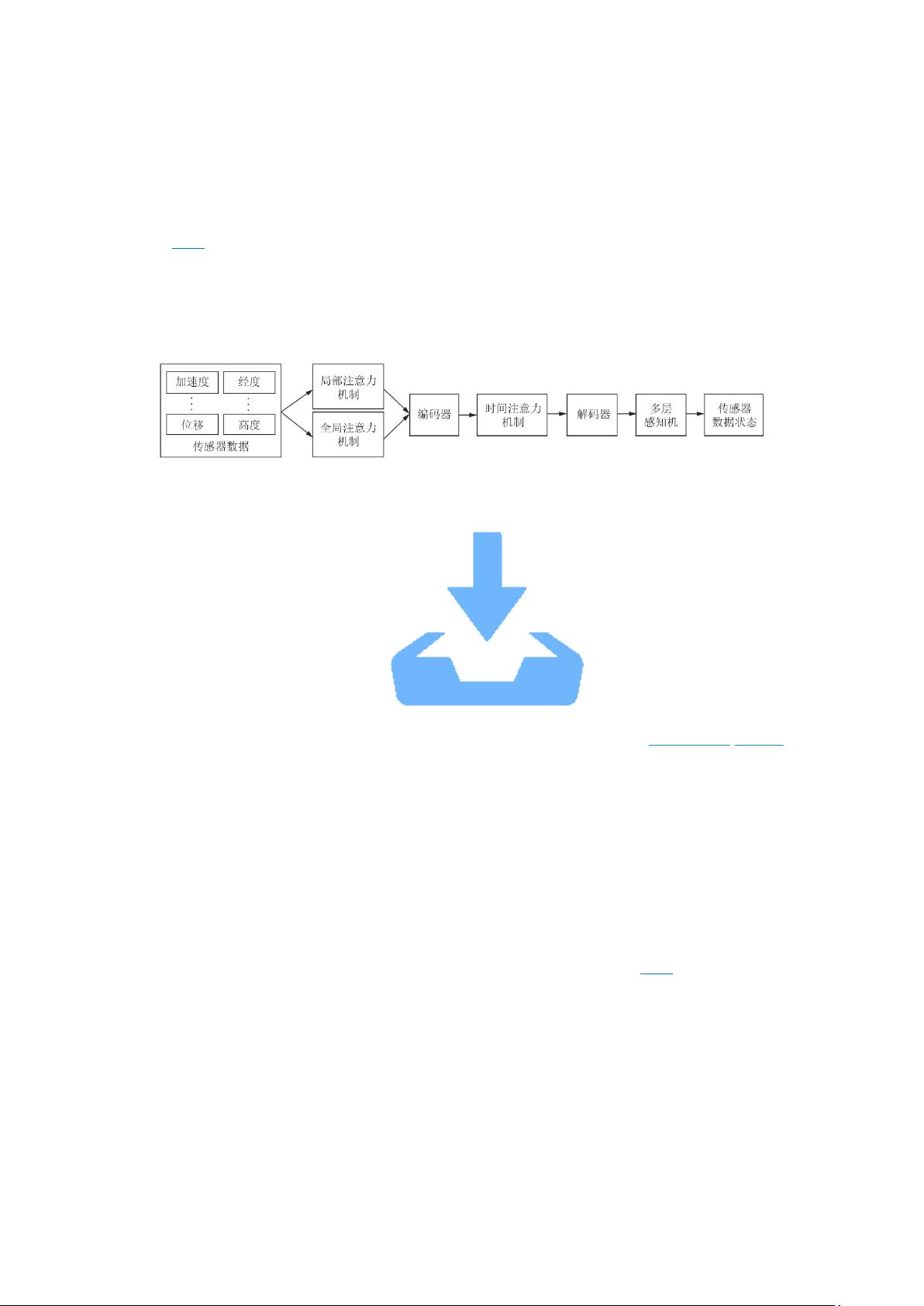
针对以上研究中出现的问题, 本文基于导航数据预处理平台
[10]
, 提出了一种基于多阶
段注意力机制的编码器−解码器(Encoder-decoder)模型算法, 该算法可以利用多类传感器数
据之间的关系进行传感器的状态互检测, 不仅可以准确检测出故障传感器, 并且可以检测出
其故障类型.
1. 问题研究
1.1 问题分析
全源导航系统中有多类型、多数量的传感器, 如光纤陀螺、加速度计、GPS 接收机、
高度计、磁力罗盘、相机和激光雷达等, 每个传感器都会产生出大量的数据, 如加速度、相
对速度、绝对速度、角速率、位移、经纬度和高度等.
在载体坐标系下, 载体的加速度、相对速度、绝对速度、位移、经度、纬度和高度存
在着一定的关系. 根据组合导航基本原理
[11]
, 多数导航系统都是以惯性导航传感器为主, 与
其余类型传感器组合进行导航. 因此, 当一个传感器出现故障时, 可以利用其余的传感器数
据来进行辅助判断. 本文的研究目的是根据多个传感器数据的输入进行故障互检测, 不仅要
检测出故障传感器, 也要识别出其故障类型.
1.2 数据说明
假设有 nn 个传感器数据, 每个传感器数据经过时间同步后在单位时间内产生等数量
的数据. 本文中设输入 x=(x1,x2,⋯,xn)T=(x1,x2,⋯,xT)∈x=(x1,x2,⋯,xn)T=(x1,x2,⋯,xT)∈
Rn×T,Rn×T,其中 TT 为时间窗口, 表示每一类传感器数据的个数. 本文采用
xk=(xk1,xk2,⋯,xkT)∈RTxk=(x1k,x2k,⋯,xTk)∈RT 表示同一类传感器数据在 TT 时间段内的
剩余10页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4512
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 个人博客-JAVA-基于springBoot个人博客系统的设计与实现(毕业论文+开题)
- 魔兽世界538源代码,亲测可用
- 到2023!地级市绿色专利获取申请数量 1990-2023 免费分享!
- ExchangeServer2003邮件安全指南PDF版最新版本
- 红帽企业Linux3(安全、安装、系统)指南CHM版最新版本
- 房地产销售-JAVA-基于springBoot的房地产销售管理系统的设计与实现(毕业论文+开题)
- ruoyi-ui-node-module
- 实证分析完整 详细分步骤教程! 含stata代码
- 加入分布式电源的前推回代潮流计算,以加入分布式电源的IEEE33配电网为例 输出各节点电压的幅值和相角,各支路的有功和无功功率,网损 方便此基础上更改分布式风光的接入位置和出力,以及做配电网相关的优化
- 火锅店管理-JAVA-基于springboot火锅店管理系统设计与实现(毕业论文)
- python毕业设计基于django+dlib库实现人脸识别门禁管理系统+运行教程.zip
- 无刷直流电机带霍尔传感器仿真,采用自建的无刷直流电机部分 转速波形完美跟踪给定值,效果良好,只有仿真
- 汇川H5U 程序 一台组装机 有几十个轴具备 完善的主控 轴控 气缸控制 ,产能统计 ,有触摸屏程序 ,类似的功能全部封装,其他项目直接可以移植过去
- 计算机网络基础知识及其应用详解与试题解读
- 2025蛇年春节对联集锦-传承文化迎新年
- No3.01 基于FX3U PLC 4×4立体车库控制系统设计 程序有全部注释 编程软件:GX Developer和组态王6.55软件 文件:PLC程序IO表【PLC接线图】组态王仿真程序
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


