基于改进自适应k均值聚类的三维点云骨架提取的研究.docx
版权申诉
196 浏览量
2023-02-23
16:51:41
上传
评论
收藏 5.71MB DOCX 举报

随着三维扫描技术和建模技术的不断发展, 点云模型已经被广泛地应用于实际的生产
生活和科学研究
[1]
, 相关的模型处理技术也在不断地深入. 骨架模型
[2]
作为三维模型的概括
型表现形式, 直观地显示了模型的拓扑连接性和几何结构, 目前已有很多三维处理技术如三
维重建
[3]
、模型分割
[4−5]
、点云配准
[6−7]
和模型形状检索
[8-10]
等以此为基础实现. 因此, 三维点
云技术的飞速发展及模型种类的不断增多对骨架提取算法的准确性提出了更高的要求. L
1
-
中值骨架提取算法
[11]
因其快速高效的特点, 被广泛地应用于点云模型骨架提取中. 该算法基
于全局中值的思想, 提出应用局部中值对点云提取初始骨架, 通过不断扩大邻域半径达到针
对不同区域实现不同程度收缩的目的; 同时, 根据点分布情况引入了引力约束和斥力约束来
实现规整化, 可以快速计算出较好的一维骨架. 但该算法也存在随机采样造成的可重复性
差, 密度不均匀情况下采样很容易丢失细节, 以及基于阈值的骨架伸长导致的错误骨架连接
等问题.
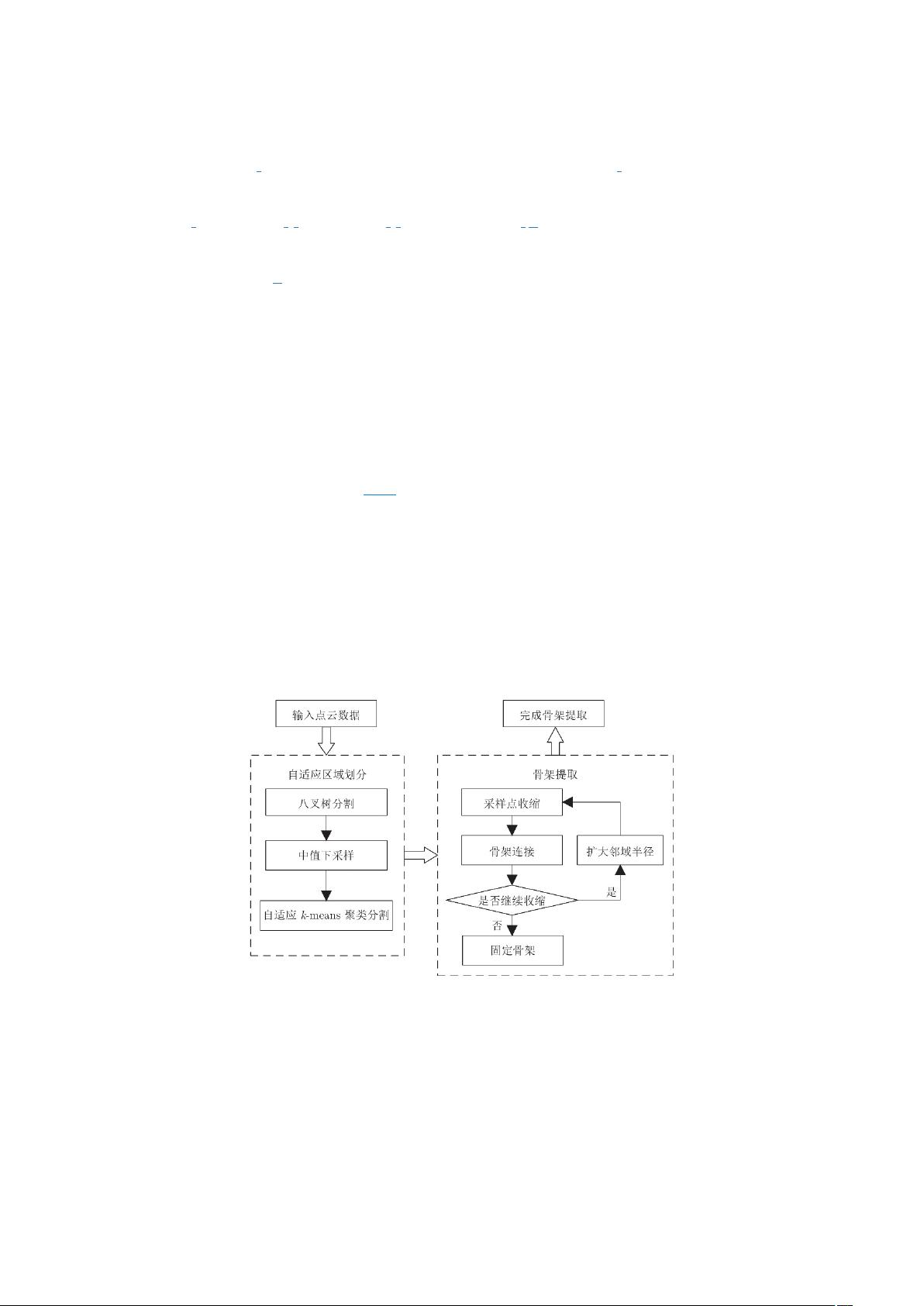
本文针对以上缺点, 提出了一种基于改进的自适应 k 均值(k-means)聚类引导的 L
1
-中值
骨架提取算法, 主要的流程图如图 1 所示. 给定一个三维点云模型, 首先采用八叉树对散乱
点云进行组织, 每个体素基于当前密度包含的点数不一; 在此结构下完成中值采样, 并利用
采样点集自适应确定初始聚类中心实现 k 均值区域划分, 应用局部中值迭代收缩得到各区
域内的骨架分支; 最后通过对 L
1
局部分支拟合曲线完成骨架平滑及连接. 本算法将密度因
素及野点的影响考虑到采样问题中, 保证模型的细节不会丢失, 同时减少了后续骨架提取的
迭代次数; 区域划分约束下提取骨架, 解决了跨区域连接错误的问题. 实验结果表明, 本文
算法与 L
1
-中值骨架提取算法相比, 有效地提升了点云骨架的准确性与可重复性, 可以达到
更好的提取效果.
图 1 本文算法流程图
Fig. 1 Flow chart of our proposed algorithm
剩余28页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3550
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- pta题库答案c语言之排序4统计工龄.zip
- pta题库答案c语言之树结构7堆中的路径.zip
- pta题库答案c语言之树结构3TreeTraversalsAgain.zip
- pta题库答案c语言之树结构2ListLeaves.zip
- pta题库答案c语言之树结构1树的同构.zip
- 基于C++实现民航飞行与地图简易管理系统可执行程序+说明+详细注释.zip
- pta题库答案c语言之复杂度1最大子列和问题.zip
- 三维装箱问题(Three-Dimensional Bin Packing Problem,3D-BPP)是一个经典的组合优化问题
- 以下是一些关于Linux线程同步的基本概念和方法.txt
- 以下是一个简化的示例,它使用pygame库来模拟烟花动画的框架.txt
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


